cdma2000-1x系统中GPS时钟算法
一、引言
对于任何通信系统,都需要提供一个精确的同步时钟,所以时钟性能与精度是影响整个系统性能的一个重要方面[1]。时钟常被称为整个系统的心脏。时钟工作时的性能主要由两个方面决定:自身性能和外同步信号的质量。整个系统各节点时钟的精度将影响系统通信过程是否正常进行。同步信号不良问题对移动通信网络的通信质量产生了不可低估的影响,目前在许多地区都因同步不良造成了不同程度的手机单向通话、掉线、通话噪音、接通率低及基站失锁等问题,对通信用户的通信质量造成了一定的影响,也对业务的收益产生了影响。同时同步不良还会造成STP链路瞬断,给正常的通信造成威胁。
CDMA系统对无线定时要求十分严格。在IS-95中规定,同一前向CDMA信道的导频PN序列与所有Walsh序列间的时间误差须小于50 ns;同一基站的不同CDMA信道的发射时间须在±1μs内,所有基站的导频PN序列的发射时间须在±10μs内,因此, CDMA网中所有基站都以公共CDMA系统时标为基准,该时标使用全球定位系统(GPS)时标,它与世界协调时(UTC)保持同步[2]。时钟同步的目的是使系统节点间信息流的帧同步,保障话音、信令、数据的正常传送。长城网和中国联通CDMA网的技术体制均规定CDMA网内以GPS系统作为时钟基准,同时以公用数字同步网的同步基准作为备用时钟基准。
关于CDMA移动电话系统和高速寻呼系统对绝对时刻(TOD)的要求,我国CDMA移动电话系统要求基站设备间的绝对时差小于10 μs,高速寻呼系统要求基站设备间的绝对时差小于2 ms。CDMA移动电话系统和高速寻呼系统对绝对时刻(TOD)的这一需求均靠每个基站使用GPS定时接收机来完成。经过接收机的处理,GPS时钟已和世界协调时(UTC)保持一致,但由于GPS空中信号以及接收处理过程中存在着不稳定因素,本文将讨论cdma2000-1x系统怎样从接收机处理后的绝对时刻(TOD)中获取精确的GPS时钟的算法。通过对此算法的描述,经过理论分析与计算数据分析,证明了此算法能很好地改善GPS在接收处理TOD过程中由于GPS信号解调以及GPS硬件设备处理的不确定性因素而造成的GPS时钟精度的损失,并给出了在cdma2000-1x系统中GPS时钟算法的具体理论参数值的选取。
二、GPS时钟算法
CDMA基站时钟主要用于为CDMA移动通信基站提供时钟信号。为了保证正常的通信和基站之间的平滑切换,要求CDMA基站时钟的频率准确度应达到1×10-11,时间同步精度应达到100 ns以上。对CDMA基站设备进行UTC(绝对时间)时间同步,必须解决两个方面的问题:第一,将GPS时间传送到时间设备,保证在传输过程中误差尽量小;第二,绝对时间同步时间设备,充分利用设备各自的时间校准机制自动实现时间同步,尽量排除人工因素。
1.GPS时钟设计原理
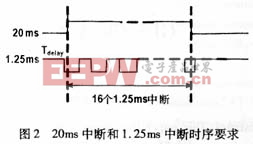
通过GPS接收机接收空中GPS信号,BSC从MSC来的数据流中提取时钟,BTS从BSC来的数据流中提取时钟。在此我们主要讨论BTS从BSC的数据流中提取时钟的算法,我们假设BSC数据流中的时钟是精确的。GPS时钟主要送来我们所需要的TOD信息、2S中断和1.25ms中断(时序见图1),其中Tlow >15 ns,Thigh>15 ns,1.25 ms下降沿与19.6608 MHz的上升沿对齐,1.25 ms延迟最大 Tdelay20μs ,300μsT625μs,要求2S下降沿与PP2S的下降沿对齐;20 ms中断由16个1.25 ms中断合成产生,其中Tdelay10 ns(时序见图2)。

我们通过对TOD信息的提取,获得相应的年、月、日、时、分、秒,并通过连续的2S中断和20ms中断维护精确的GPS时钟,以保持与国际标准时(UTC)同步,见图3。 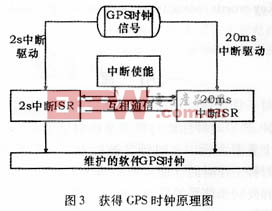
2.GPS时钟算法描述
此算法假设硬件时钟具有不确定性。通过串口可以读取当前时钟并能通过此算法在任何时候均能校正时钟。由于2S中断和1.25ms中断是通过GPS卫星传递的时钟信号解调而来,并且20ms中断是由1.25ms中断合成的,所以我们假定2S中断和20ms中断是可信任的。
定义有穷自动机:
M=(Q,∑,δ,S0,F)
其中Q={Si|当前维护的GPS软件时钟的状态,0≤i≤n};∑={0,1|2S中断中20ms中断个数是100,2S中断中20ms中断个数不是100};δ是转移函数,若事件б∈∑,状态Si∈Q,0≤i≤n,则转移函数δ(Si, б)表示状态机在发生事件б后由状态Si转移到下一个状态。当条件参数值为0时,GPS时钟自动机转入下一个状态Si+1(Sn例外,条件参数值为0时在本状态循环),当条件参数值为1时,GPS时钟自动机转入初始状态S0;GPS时钟自动机初始状态为S0,终态F是Sn。
设S0、S1、S2.......Sn分别表示当前维护的GPS时钟自动机的状态,我们假设GPS时钟自动机初始是不稳定的,则GPS时钟自动机状态转移过程由图4来表示。其中0,1为状态参数转移条件,因为n为某个未定的值,因此转移状态队列用虚线表示。经过一系列的条件转移状态,若满足适当的条件,自动机进入稳定态Sn。
算法 时钟 GPS 系统 cdma2000-1x cdma2000-1x系统 GPS时钟 时钟精度 时钟同步 相关文章:
- 各大仿真软件介绍(包括算法,原理)(09-08)
- 智能天线赋形EBB算法和GOB算法比较(11-19)
- 高通多用户MIMO技术(04-14)
- 滤波算法知多少?各种数字滤波算法的优劣分析(07-14)
- 一种RFID数据压缩算法的研究(01-04)
- 一种RFID接入可信计算平台方案设计(03-29)