cdma2000-1x系统中GPS时钟算法
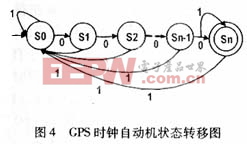
在状态S0、S1、S2.......Sn的迁移过程中,在不同状态下分别完成打开GPS时钟、读取GPS时钟、计算GPS时钟、关闭GPS时钟等一系列动作。在状态Sn处,我们已通过串口获得GPS软件时钟,且此软件时钟中20ms中断维护计数器加1(此GPS时钟的精度单位为20ms),保证时钟正常运行;在某个循环周期内通过2S中断重新获取时钟,并对时钟精度进行校正。在正确得到GPS时钟后,通常情况下,时钟处于稳定状态,此时GPS时钟自动机在状态Sn处循环运行。
当时钟自动机条件转移参数值为1时,此状况通常由以下情况造成:
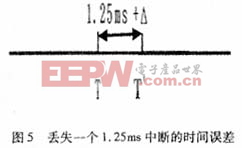
情况一:GPS时钟模块在信号的解析过程中丢失了一个1.25 ms中断;
情况二:GPS时钟模块在信号的解析过程中丢失了一个2S中断;
情况三:其他原因(如多了一个1.25ms中断或多了一个2S中断等情况)。
若状态转移参数值为1,自动机状态将迁移到初始状态S0,并重新获取并校正GPS时钟。每经过一个2S中断,时钟状态将根据条件转移参数值的不同进行状态间的迁移,重新取时钟并进行时钟校正。若GPS时钟的2S中断和20ms中断连续稳定,自动机将处于稳定态Sn,并且由20ms中断继续维护当前的软件时钟,为上层提供持续不断的时钟,时钟校正后更新当前时钟。
此自动机具有如下性质:
安全性:本文提出的GPS时钟自动机不含任何等待不可能发生事件的状态,即自动机无死锁;收到预期条件转移会跳出等待循环,即自动机无活锁;
完整性:自动机不含未定义的条件转移参数,包括正常和异常处理,即自动机具有完整性;
活动性:经过有限步可回到初态,且无不可达态,即自动机具有活动性。
三、GPS时钟算法分析
根据本算法所取得的GPS软件时钟与标准时之间的时钟误差精度主要是由于1.25ms中断与2S中断的不稳定性决定。
1.时钟精度分析
由20ms中断和1.25ms中断时序(图2)可以看出,在20ms中断中出现的1.25ms中断的个数一定是16个(由硬件实现),但由于1.25ms中断可能丢失或增加等情况,这就造成了两个相邻20ms中断间隔并非完全是20ms,这将改变GPS时钟自动机的条件转移参数值为1;若丢失或增加一个2S中断,也会改变GPS时钟自动机的条件转移参数值为1。以上两种情况就增加了所维护的GPS时钟的不稳定性因素。我们定义标准时间为T,算法所取到的时间为T′,2S中断处理时间为Δ。下面将讨论它们的具体关系(对条件转移参数值为1时的3种情况进行讨论):
情况一:这种情况发生的概率相对来说较大。若丢失一个1.25ms中断,由于20ms中断之间必须保证有16个1.25ms中断,也就是说即将到来的20ms中断比标准时将推迟1.25ms+Δ,见图5。
情况二:这种情况发生的概率相对来说较小。丢失一个2S中断,将会使条件转移参数值为1,使自动机当前状态迁移到初始状态,自动机将重新获取时钟并校正时钟,但不会影响时钟精度。
情况三:这种情况发生的概率微乎其微。但若1.25ms中断多了一个,也就是说即将到来的20ms中断比标准时将提前1.25ms-Δ(见图6);若多了一个2S中断,自动机将重新获取并校正时钟,但不会影响时钟的精度。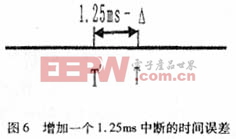
我们对连续的1.25ms中断进行分析,假设每次1.25ms中断正确到来的概率为p,丢失或增加了一个1.25ms中断的概率为q(稳定情况下每天平均±1×10-11,失锁保持稳定情况下每天平均(1×10-10),其中p+q=1。对以上3种情况,我们进行k次取样,假设前k-1次1.25ms中断均正确到达,但第k次1.25 ms中断丢失或增加了一个1.25ms中断的概率为p{X=k},此随机变量X符合几何分布[5],即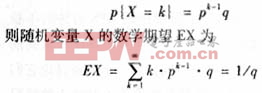
也就是说,平均有1/(1-p)个1.25ms中断中将有一个1.25ms中断丢失或增加。
令从GPS时钟自动机的初态开始运行到现在的总时间为Tw,每两个相邻的1.25ms中断时间为T0=1.25ms,假设GPS时钟的误差精度为ΔT,本算法计算的GPS时钟时间为T′,标准时间为T,所以时钟误差[3,4,5]为
2.参数选取分析
对本文的GPS时钟自动机状态数n进行讨论。我们以MPC 860处理器为例,一个时钟周期大约为20 ns。计算GPS时钟时间可能要有以下步骤:
(1)清空2S中断中20ms中断个数计数器,设置初始状态S0,重新定位标准输入/输出,使与串口脱离,从而避免标准输入将输入的东西截走,此操作一般需60 ns左右;
(2)打开GPS时钟,设置串口信息,此操作一般需30 ns左右。设串口速率为9 600 bit/s,从串口读时钟送到缓冲区大约需50 ms;
(3)从缓冲区读GPS时钟,计算并设置当前时间,此操作一般需1μs左右;
(4)校正GPS时钟,关闭GPS时钟,并将标准输入/输出重新定向,此操作一般需60 ns左右。
以上任意两个步骤是不能并行完成的,因此我们取GPS时钟自动机状态数n为4。由于自动机在终态S4的开销时间为60 ns(即中断处理时间Δ),此时我们的时钟误差重新校正为ΔT ∈(-1.25 ms×m+60 ns,1.25 ms×m+20 ns+10 ns+60 ns),即ΔT ∈ (-1.25 ms×m+60 ns, 1.25 ms×m+90 ns)。
通常情况下q的理论值在±1×10-10,此时随机变量X的数学期望值EX为1/±1×10-10 =±1×1010。但在GPS设备的使用过程中时钟精度会随设备的老化或其他因素而进行漂移,这是我们必须要考虑的因素。我们假设最坏情况下值q∈ (±1×10-11,±1×10-8)范围内,总时间为Tw(Tw与q之间确定的参数m值见表1),则时间t(单位为天)与时钟误差ΔT的关系如图7。
算法 时钟 GPS 系统 cdma2000-1x cdma2000-1x系统 GPS时钟 时钟精度 时钟同步 相关文章:
- 各大仿真软件介绍(包括算法,原理)(09-08)
- 智能天线赋形EBB算法和GOB算法比较(11-19)
- 高通多用户MIMO技术(04-14)
- 滤波算法知多少?各种数字滤波算法的优劣分析(07-14)
- 一种RFID数据压缩算法的研究(01-04)
- 一种RFID接入可信计算平台方案设计(03-29)