基于MXTOS2-200模块的开放式高动态平台设计
摘要:针对北斗/GPS接收机在高动态环境下的重要应用,利用某SOC平台设计一种开放式高动态接收机平台,并对其开放式方法进行研究。首先,进行北斗导航原理介绍及接收机设计分析;其次进行高动态平台构建;然后,进行北斗/GPS高动态关键技术及可配置开放式方法研究,并提出下一步研究重点。
引言
卫星导航定位系统是目前使用最为广泛的导航和定位系统,大量应用在民用和军事作战领域,在民用主要是静态和低速的场景,然而在军事领域,尤其是在精密制导导弹中主要是高动态场景为主。与静态和低速环境下相比,高动态环境对接收机可靠接收信号带来了巨大的技术挑战,高动态环境给接收机接收信号带来了许多问题。
本文主要从高动态接收机的整体设计和针对开放式设计做了设计和研究,重点研究了高动态接收机开放式设计,为高动态的研究提供一种新的方法和思路。
卫星导航定位原理
卫星导航定位系统的定位原理和过程可以简述如下:在一个立体直角坐标系中,任何一个点的位置都可以通过三个坐标数据X、Y、Z来确定。如果能测得某未知点与其他三点(A、B、C)的距离,并确知A、B、C三点的坐标,就可以建立起一个三元方程组,解出该未知点的坐标数据,从而得到该点的确切位置[2]。然而要实现三维定位,在实际中至少需要四颗可见卫星,这是由于接收机、卫星、GPS时间系统三者之间的实际中不可能实现完全同步,他们之间总存在着一个随机的误差。
在卫星导航系统为了确定用户的位置(x,y,z),需要对多颗卫星进行伪距测量。在进行伪距测量时,可以根据多种方法来获得伪距测量值。根据观测量性质的不同,可以分为测码伪距定位和测相伪距定位,即伪距测量定位和载波相位定位。在实际应用中由于载波相位存在模糊周问题,因此主要是应用伪距测量来实现定位。假设卫星到接收机的伪距为 ,天空中卫星在ECEF坐标系中的坐标向量
,天空中卫星在ECEF坐标系中的坐标向量 ,接收机在ECEF坐标系中的坐标向量
,接收机在ECEF坐标系中的坐标向量 ,则可以建立如下的四元方程组:
,则可以建立如下的四元方程组:
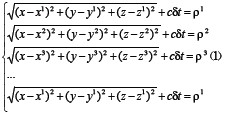
在方程组中 是随机事件误差,通过用最小二乘法求解的方式可以求出接收机的坐标。
是随机事件误差,通过用最小二乘法求解的方式可以求出接收机的坐标。
高动态接收机面临的问题
高动态一般定义为定位目标具有较高的速度,加速度和加加速度。高动态环境使得载波产生较大的多普勒频移和频率变化率,如果使用一般的锁相环进行载波的锁定,会导致载波多普勒频移经常超出锁相环的锁定,超出锁相环的捕获带,无法保证对载波的可靠捕获和跟踪,为此必须增加环路带宽。但是,带宽的增加会引入宽带噪声,使载波跟踪环路失锁,无法解调数据。另一方面,高动态环境下伪码也会产生动态延时和频移,使得接收机的码跟踪环路很难跟踪上相位地变化,容易失锁不利于伪距的测量。而且码相位的偏移会使捕获的时间变长,这样一来接收机的导航将变得困难。
针对高动态的这些问题,已提出了一些解决方案:一种是给高动态接收机提供惯性导航系统的辅助信息,使接收机的环路更容易跟踪上卫星信号,接收机得以可靠工作。另一种方案是研究适合高动态环境下扩频信号跟踪的频率估计算法,以适应各种高动态环境下的信号跟踪。
接收机软硬件设计
在接收机分成两大部分:模拟射频前端和数字基带处理。其中,模拟射频前端部分由射频模块和A/D模块两部分构成;数字基带由捕获、跟踪、PVT解算、卡尔曼滤波等模块构成;具体结构如图1。
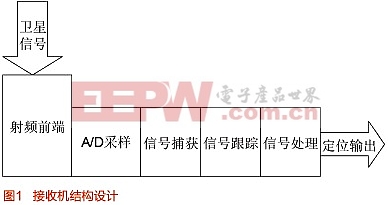
大体上讲,射频模块接收卫星信号后,将信号转成中频,经过A/D变化为数字中频信号,然后基带部分将完成数字下变频、信号预处理、数据提取、数据解算等任务。
硬件电路设计
如图2所示,北斗/GPS开放式高动态接收机硬件架构,射频前端采用兼容有源天线,单路高频信号输入,射频前端信号处理一体式设计,兼容GPS的L1频点和北斗系统的B1频点,射频输出为两路数字中频直连基带部分。数字基带芯片MXT3013是北京微电子技术研究所自主研发的一款多模导航SOC芯片,其内部包括有一个直接捕获模块、32个RNSS/GPS跟踪通道、10个RDSS直接捕获模块和跟踪通道、ARM9、VFP9、存储单元、2个UART、1个I2C、1个IC卡接口、通用I/O接口、看门狗、定时器等各部分。捕获模块采用改进FFT算法实现信号的快速捕获,多路并行高速通道可以实现多星座卫星同时稳定跟踪,高性能ARM9 CPU内含浮点单元和二级CACHE,提供嵌入式高速运算性能。外围配以电源管理单元、外部数据接口。数据流程为:高频信号从双模天线进入射频前端进行滤波、变频与数模转换,分离出卫星两路数字中频信号,进入数字基带后经过捕获单元对卫星进行捕获,之后将捕获到的GPS/北斗
- 北斗卫星导航系统的特点(02-02)
- R&S公司全面展示卫星导航北斗测试方案(05-08)
- 利用RFID和卫星导航技术实现车距监测的预警(09-24)
- 基于Cortex-M3的北斗二代基带芯片设计(10-27)
- BOC调制信号频谱特性及仿真分析(01-18)
- 开放式多模导航接收机设计(09-21)