开放式多模导航接收机设计
摘要:单北斗或GPS导航接收机以及传统整体式的设计已不能满足当前导航接收机在不同领域的深入应用,具有高效、可靠、可控的深度开发能力的多模导航接收机设计是推进北斗导航应用的重要因素。以自主研发的多模导航为核心,结合未来导航终端发展技术特点,提出一种基于组件设计方法的开放式多模导航接收机,对多模兼容及开放式设计方法展开研究并建立接收机开发流程。内容包括:首先,分析多模导航SoC及接收机开发原理;其次,阐述基于组件的开放式多模导航接收机设计,并提出针对不同硬件平台的多层次软件开发流程;然后详细介绍以算法为核心的组件设计关键技术及可配置开发方法;最后,总结并验证实现该开放式多模导航接收机,提出下一步研制重点。
引言
随着北斗卫星导航系统的组网完成,传统单一GPS导航应用将被多星融合导航所替代,多模卫星导航接收机研发应用的国产化将成为我国卫星导航应用领域的重要发展趋势。长期以来,国外在卫星导航领域已经形成了成熟的技术产业链,在接收机研制、导航芯片设计及导航算法软件开发等各个方面均占有完全主导地位,在商用、消费类电子中,国外产品占据垄断,在军用、组合等高端应用领域严格控制产品与技术输出,同时在GPS、Galileo、GLONASS多模接收机的研发也具有相当成熟度。而国内导航接收机的研发水平基本停留在实验室阶段,产品实用性、可靠性与性能都与国外产品有较大差距。借助北斗系统的建立,国内导航研发应用单位可以大力推进自主技术的进步与多模导航接收机的研发。同时随着卫星导航技术在各个领域的深入应用展开,低功耗、小体积、高可靠、高性能、可控可配置的国产接收机研发成为各方关注的焦点,也是导航应用技术的重要突破方向。
本文以卫星导航接收机为研究对象,以传统的卫星导航理论为参考,结合未来导航接收机发展需求与特点,基于MXT3013芯片提出一种开放式多模卫星导航接收机的设计,并对多星座导航关键技术及开放式应用方法进行了深入探讨,以其提供适用于未来导航接收机深层次应用的研发思路。

导航原理与接收机设计
传统GPS导航接收机由天线、射频前端、数字基带、核心处理单元及外设等部分组成,国外成熟产品均采用双片一体式解决方案,以射频芯片和基带芯片整合完整模块,配以外围电路构成接收机硬件,导航软件在功能定型后则直接固化在硬件内部。成熟接收机方案多采用窄带GPS射频前端保证高频信号质量,通过硬件的快速捕获和并行多通道跟踪,同时利用嵌入式资源通过软件计算并输出定位信息。由于导航系统的差别和接收机的封闭性,当前接收机不能用于北斗系统,更无法做到有北斗卫星的多星座兼容。由于国内接收机绝大部分采用国外芯片制成,使用过程用户只能被动接收基本定位信息,无法获取并控制内部核心数据与资源,也不能进行深度的功能定制和二次开发等更多高级应用,这直接限制了高端用户对于接收机研发的方法和能力。
多模导航接收机要求能够对多个卫星导航系统进行兼容并用,虽然各导航系统基本原理相似,但是由于频点及导航定位具体实现的差异,接收机设计中必须考虑不同系统的兼容使用。这里以北斗与GPS双模兼容设计导航接收机,同时考虑到深入应用的具体要求提出全新的开放式设计与应用方法,实现应用过程自主可配。
硬件设计
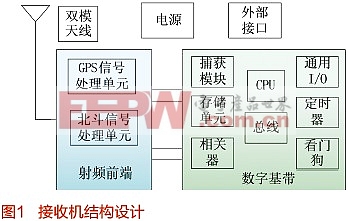
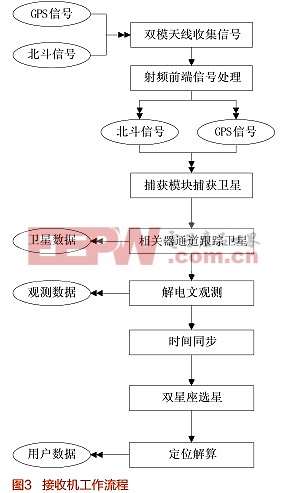
如图3所示,北斗与GPS双模接收机硬件架构形式一致,射频前端兼容GPS与北斗频点单路输入两路数字中频直连基带部分。数字基带采用北京时代民芯科技有限公司自主研发的MXT3013导航SoC,实现数字信息的处理与定位解算。
软件架构
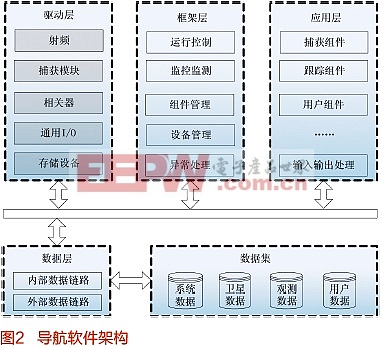
导航算法和软件也是接收机的核心内容。设计采用基于组件的面向对象的软件设计方法,实现嵌入式环境下无操作系统软件架构,如图4所示。软件设计分为驱动层、框架层、功能层、数据层。驱动层为软件对射频与基带硬件的通行控制,其中包括对射频参数的调整、信号链路的选择、对基带捕获模块及跟踪通道的管理使用,对CPU及外围存储等设备的驱动管理。框架层控制程序的整体结构,包括软件运行、软件及硬件中断控制响应、应用功能运行流程调用、运行监控、输入输出控制、异常处理等。功能层为导航算法及功能的具体实现,包括自适应快速启动、信号的捕获与跟踪、卫星信息的提取与解算管理、本地信息的提取解算等不同功能组件,各组件间算法不存在必要并行依赖或仅存在少量非必要依赖性,组件可有条件重构选取或自行升级替换。数据层为程序运行过程所有数据流的管理与交互,包括数据存储区、内部数据通信链路、外部数据通
- 北斗卫星导航系统的特点(02-02)
- R&S公司全面展示卫星导航北斗测试方案(05-08)
- 利用RFID和卫星导航技术实现车距监测的预警(09-24)
- 基于Cortex-M3的北斗二代基带芯片设计(10-27)
- BOC调制信号频谱特性及仿真分析(01-18)
- 基于MXTOS2-200模块的开放式高动态平台设计(08-21)