RSSI 室内节点定位系统设计
摘要:本文介绍了无线传感器网络节点定位系统,分析了系统组成,并且重点介绍了系统硬件和软件的组成和设计,并对RSSI定位算法在该定位系统上进行了验证分析。
引言
无线传感器网络的各种应用中,节点的位置信息至关重要[1,2]。针对不同的定位形式,现在已设计出了不同的定位算法,这些定位算法主要从理论上进行了相应的研究,并且使用仿真的方法进行定位算法的验证,设计实际的节点定位系统对于无线传感器网络中各种算法的分析有着更大的现实意义。本文设计了一个无线传感器网络节点定位系统(LSBR),并对基于RSSI的定位算法在系统上进行了验证分析。本文对节点定位系统的组成、硬件、软件以及试验方法进行了相应的介绍。
系统组成及硬件设计
系统组成及工作原理
LSBR(Localization System Based on RSSI)定位系统基于RSSI测距原理[3,4],利用射频信号实现对室内移动目标的定位,系统由信标节点、目标节点、汇聚节点和位置计算装置等部分组成,采用了一种主动式的定位架构,由目标节点向信标节点发送射频信号。其中信标节点一般安装在屋顶天花板上,目标节点安装在移动机器人等装置上。具体的系统组成和工作原理如图1所示。
如图1所示,信标节点放置在室内的固定位置,如天花板上,其位置已事先测量获得,并保存在位置计算装置上,目标节点安装在移动机器人上,数据收集器与位置计算装置连接。目标节点同时向屋顶的信标节点发射射频信号,射频同步信号携带目标节点的ID信息。当信标节点接收到射频信号后,检查ID信息,如果ID信息正确则接收信号,接收到信号的节点依次将测量数据通过无线方式发送给汇聚节点。汇聚节点计算出目标节点与信标节点的距离,并通过串口通信传给位置计算装置。位置计算装置根据事先建好的坐标系、信标节点坐标和距离数据计算出目标节点坐标。
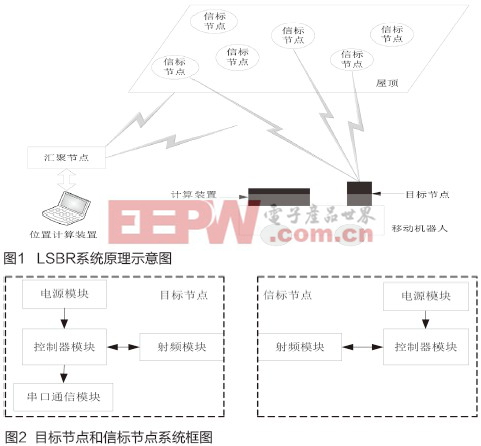
系统硬件主要由目标节点、信标节点和汇聚节点组成。其中目标节点和信标节点通过射频模块来实现测距功能,汇聚节点主要负责接收数据并实现距离计算。目标节点和信标节点的系统框图如图2所示。
系统节点设计
信标节点设计
信标节点包括控制器模块、射频模块、电源模块等部分组成,其功能主要包括接收目标节点发射来的射频信号,并将测得数据发送给汇聚节点。信标节点处理器采用CC2430芯片[5,6],其工作电压为3.3V,CX20106A芯片工作电压为5V,故电源模块采用7.2V锂电池供电。输入电源首先通过电容进行滤波,再通过LM7805电源稳压芯片输出稳定的5V电压,5V电源其中一路输出给CX20106A芯片使用,另一路通过LM1117电源稳压芯片输出稳定的3.3V电压,提供给CC2430芯片处理器使用。电源电路原理图如图3所示。
目标节点设计
目标节点包括控制器模块、射频模块、通信模块、电源模块等部分组成。该节点一般不单独使用,需要与移动机器人装置连接,主要功能包括接收移动机器人发送来的定位命令、射频信号、输出工作状态等。目标节点系统框图如图2所示。目标节点的处理器同样采用了CC2430芯片,使用其内嵌RF射频模块取代单独的RF射频模块。目标节点电源电路原理图如图4所示。

汇聚节点设计
汇聚节点包括控制器模块、射频模块、通信模块、电源模块等部分组成,其主要功能是通过射频模块收集信标节点的测量信息,计算目标节点与各个信标节点的距离,并通过串口将各个信标节点编号和距离传给位置计算装置。在较大规模的网络部署中,也可通过ZigBee网络将距离数据传给远端的位置计算装置。汇聚节点控制器同样采用CC2430芯片,汇聚节点的系统组如图5所示。
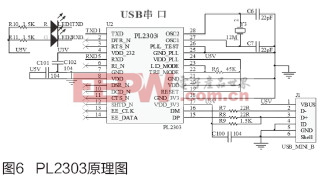
串口通信模块采用了控制器的USART片内外设,可输出TTL的串口通信数据。由于位置计算装置多采用PC机,最新生产的PC机一般都取消了RS232通信接口,采用更为方便的USB接口,故在汇聚节点中采用了Philips公司的PL2303数据转换芯片[7],可将TTL的串口数据转换成USB通信数据,方便与电脑连接。PL2303的转换电路如图6所示。
一般PC机的USB接口可提供5V的直流电源,最大电流可达500mA,足以满足汇聚节点的电源需求。汇聚节点通过USB接口从位置计算装置获得5V电源,输入的5V电源首先通过电容滤波,再通过稳压芯片输出给处理器稳定的3.3V工作电压,在该节点中,选用专为通信控制芯片提供转换电压的LM1117为转换芯片,它具有功耗低,体积小等优点。又因为电压中含有许多高频干扰源,这些高频成分很容易经过电源进入通信系统中。另外系统自身的发送频率也会经过电源感应反馈到通信系统造成干扰。因而可在电源电路中加入220μH的电感,与并入多个
- 基于RSSI测距信号衰减因子的WSN定位算法研究(07-27)
- ZigBee技术中基于RSSI测距的定位算法研究(05-08)
- 基于ZigBee技术的室内定位系统的设计(03-25)
- 无线传感器网络在军事的应用(08-19)
- 基于超声波的定位系统设计(06-27)