RSSI 室内节点定位系统设计
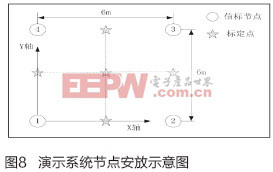
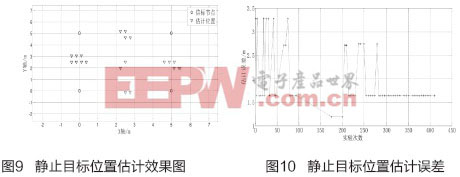
一般PC机的USB接口可提供5V的直流电源,最大电流可达500mA,足以满足汇聚节点的电源需求。汇聚节点通过USB接口从位置计算装置获得5V电源,输入的5V电源首先通过电容滤波,再通过稳压芯片输出给处理器稳定的3.3V工作电压,在该节点中,选用专为通信控制芯片提供转换电压的LM1117为转换芯片,它具有功耗低,体积小等优点。又因为电压中含有许多高频干扰源,这些高频成分很容易经过电源进入通信系统中。另外系统自身的发送频率也会经过电源感应反馈到通信系统造成干扰。因而可在电源电路中加入220μH的电感,与并入多个不同容值的电容所构成的滤波电路来抑制各种高频信号。使节点能够得到稳定可靠且低干扰的电源,保证其可靠运行。具体电源电路如图7所示。 系统软件设计 定位系统需要目标节点、信标节点、汇聚节点、位置计算装置协调工作完成定位功能,其中的目标节点具有两种工作模式,连续模式和命令模式。在命令模式下,当目标节点接收到机器人发出的定位命令后,进行RSSI测距;在连续模式下,目标节点连续发送射频信号进行RSSI测距。两者主要工作步骤相似,下面仅对目标节点基于命令模式定位方法的工作步骤进行描述。其中测距公式采用式(1)计算。 通过公式(2)计算出目标节点与各个信标节点的距离d(m),其中的μ为修正系数可通过信标节点的位置可知。 具体工作步骤如下: (1)信标节点启动,首先初始化,然后立即进入实时监测射频同步信号状态。 (2)目标节点通过串口通信模块接收到移动机器人的定位请求后,立即发送射频信号,其中的射频信号携带目标节点的ID信息。 (3)当信标节点接收到射频同步信号后,立即检测接收到的ID信息是否与目标节点的ID信息相同。如果不相同则放弃,进入之前的等待射频接收状态;如果相同则接收。 (4)信标节点将节点编号、RSSI测量值打成一个数据帧,跟据节点编号顺序依次将数据帧通过无线的形式发送给汇聚节点。 (5)汇聚节点收到数据后,根据节点编号利用公式(1)、(2)计算出目标节点与各个信标节点的距离d(m),最后汇聚节点将计算得到的各个信标节点的数据打包,发送给位置计算装置。 (6)位置计算装置根据事先建立的坐标系、信标节点坐标和距离d,利用极大似然估计等方法,计算目标节点在水平面上的位置坐标。至此,一次定位过程完成。定位系统的信标节点具有相同的无线接收本机地址,记为地址1,目标节点向地址1发送携带ID信息的射频信号,所有信标节点可同时接收到目标节点发来的射频信号。对于多个信标节点向汇聚节点的数据传输问题,本章提出了一种基于节点编号的延时互补传输方法,相比较基于扫频模式的多点传输方式其具有更高的可靠性,并且能够结合本系统的特点解决短时间内大量信标节点的传输问题。具体方法为:信标节点编号10个为一组进行编码,并且信标节点的部署时保证具有相同位数编码的信标节点的测量范围不重叠。信标节点根据编号的位数依次传输数据,使传输时间间隔平均分配在18ms的数据传输窗口内。当信标节点数据传输完成后,进行相应的补偿延时,等待18ms数据传输窗口时间结束的到来,并以此作为同步时间,进入下一轮RSSI测距循环。这样各个信标节点具有了相同的RSSI循环测距周期,避免了因各个节点的工作不同步导致的紊乱状态。 基于定位系统的定位实验 为了验证定位系统的定位效果,本文搭建了一个4个信标节点的测试演示系统。信标节点安放在天花板上,其具体安放位置和节点编号如图8所示。在静止目标定位实验中,设定了5个标定点。该测试系统中,屋顶离地面的高度约为2.8m,本次实验每个标定点测试了100组数据,由于数据量较大,本文只给出了第一个标定点的测量数据。 使用MATLAB对上表实际测量数据进行定位,其定位效果如图9所示,500组测量数据的定位误差如图10。实测数据的平均定位误差为2.3m,最大误差为4.3m。分析可知,造成误差的主要原因包括两方面:由系统本身测距误差造成,该误差不可避免,主要由空气温度、密度不均衡等环境噪声引起,另外程序执行语句与事件状态在时间上的细微变化也会对其造成一定的影响,该误差通过各种优化设计已控制在可接受的3m范围内;测试系统的安装误差,主要是人为造成,可根据定位精度需求及使用环境进行修正。 如图10所示x轴的某些采样处出现的较大变化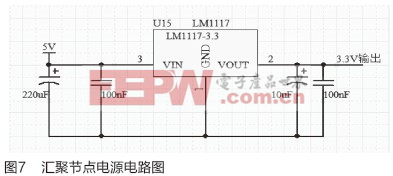

式中, 为接收到信号强度,模型参数A、n是根据实际环境测的数据得到的。
为接收到信号强度,模型参数A、n是根据实际环境测的数据得到的。

- 基于RSSI测距信号衰减因子的WSN定位算法研究(07-27)
- ZigBee技术中基于RSSI测距的定位算法研究(05-08)
- 基于ZigBee技术的室内定位系统的设计(03-25)
- 无线传感器网络在军事的应用(08-19)
- 基于超声波的定位系统设计(06-27)