基于超声波的定位系统设计
传感器技术、微机电系统、现代网络和无线电通信等技术的进步,推动了无线传感器网络的产生和发展。无线传感器网络具有广阔的应用前景,能应用于军事国防、工农业控制、城市管理、生物医疗、环境定位、抢险救灾、危险区域远程控制等诸多领域。
超声波定位的原理与无线电定位系统相仿,只是由于超声波在空气中的衰减较大,只适用于较小的范围。超声波在空气中的传播距离一般只有几十米。短距离的超声波测距系统已经在实际中应用,测距精度为厘米级。超声波定位系统可用于无人车间等场所中的移动物体定位。
1 超声检测原理
1.1 回波信号
超声检测信号分析系统的原理是通过超声检测仪和信号采样装置及计算机的相互协调,实现超声检测电信号的模数转换,并完成检测数据的存储,计算机根据己量化的回波信号数据,利用有关理论及技术作相应处理。超声检测是一种物理手段,利用超声波的性质来判断目标的距离。是根据超声波在检测区域内运动时遇到界面反射所呈现的特征来判断物体位置状况的无损检测方法。
超声波检测中常用技术是把超声波短脉冲发送至被测物体,当声波自物体的非连续性结构或边界返回时,获取其回波波形。当波触及物体前壁面时,有几个振荡周期的窄带随机波产生,称为始波,与此同时,还有一部分超声波渗入被测物体,触及物体的后壁面,又可得到振荡的回波,称为底波。利用始底波之间的时间间隔与己知的声波在物体中的速度,便可算出物体的距离。同样,当声波触及被测物体内的气孔、杂质等非连续性目标位置时,也会产生回波,据此得出目标位置的信息,如目标位置在检测区域内的大致位置性质等。
1.2 模型的建立
超声波检测中所处理的是振荡波,具有窄带随机信号的特性。传统的超声波检测设备采取硬件检波的方法提取回波包络,检测精度和主峰位置的精确定位都无法保证。由于目标回波位置直接决定了测量精度,尤其对运动目标,如何精确测定出回波位置是技术的关键所在。本文介绍的信号采集系统包括传感器信号采集设计及传感器与MOTE之间信息传递的硬件设计与构造。超声波传感器的特点是其方向性好且可以达到厘米级定位精度,在一些要求较高的定位系统如DPEG及 Crickets都是采用基于超声波传感器的测距方式。
超声波传感器的工作原理是:信号时间在零时刻发出一束声波,假设传感器在经过时间t后接收到返回的超声波,根据公式s=vt,取值v为34000cm/s,实际中的超声波发射时间单位是毫秒(mm),换算后为10-6s,则

根据此公式可求得距离值s,其中值与传感器的定时器有关,是一个与硬件设备关系密切的采样值。在系统中,假设超声波传感器的定时器为16位,则 216=65536,65536/58=1129,即能够定位的范围在11H左右。我们在实际中发现采集到的数据与实际的距离还存在一个线性关系,利用 16位的定时器能够探测的距离仅在1.46m之内,这对于目标定位系统是灾难性的限制。对此采用降低时间精度来提高超声波的工作范围,把时间精度降低为原来的1/3,则实际的探测范围相应提高到原来的3倍,达到4.8m。经过实际检验,证明该设计可以实现且有良好准确的测距效果。
2 系统的组成
系统由超声波传感器、节点网关、无线网络、笔记本和线遥控玩具小汽车组成。如图1所示。
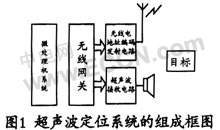
无线传感器网络的数据通过网关传人计算机,服务程序解析数据内容并进行处理,一部分内容于事件归类后存入数据阵,用作分析查询。另一部分内容仅用于不同传感器之间的数据融和,即不同传感器的自身位置信皂在进行通信控制之后,由传感器节点将其丢弃,因为传感器节点的存储空间和能量有限,大量的数据存储不仅会浪费空间,而且会耗费电池。数据库根据需要可以选择数据进行位置估算,然后再对风向、障碍物、地面高低起伏等影响因素进行参数修正,确定目标在检测区域内的位置信息。后台系统通过无线网关与无线传感器实现联络。另外这些消息需通知负责用户界面部分的程序模块,以可视化的力式显示定位到的内容。
超声波定位系统在具体实现上与无线电定位有所不同。不同发射点的无线电信号可以用不同的频率来区分,而超声波系统难以做到,因此必须有一种能够把各个发射点的超声波信号区分开来的方法。我们采用带地址编码的无线电触发电路分别触发各个发射点。
以发射点固定、主体接收的超声波定位系统为例。主体部分由微处理机电路、超声波接收电路和无线电编码触发电路组成;发射点部分由超声波发射电路和无线电编码接收电路组成。系统的工作过程首先由微处理机选定要触发的发射点地址,启动发射电路并开始计时,
- 汽车正在变成行进中的传感器平台(06-02)
- 基于嵌入式Linux的语音识别系统硬软件设计(07-02)
- AT89S52单片机超声波测距系统电路设计(06-24)
- 智能小车主控系统电路设计图剖析(08-11)
- 超声波热量表芯片UTA6905的相差法流量测量原理(07-06)
- 什么是室内定位技术与长距离移动定位技术(06-13)