基于无线通信的嵌入式机器人控制系统设计
直流信号后加在超声波换能器MA40S2S进行超声波发射。如果超声波换能器长时间加直流电压,会使其特性明显变差,因此一般对交流电压进行隔除直流处理。U2A为74ALS00与非门,control_port(控制端口)引脚为控制口,当control_port为高电平时,超声波换能器发射超声波信号。
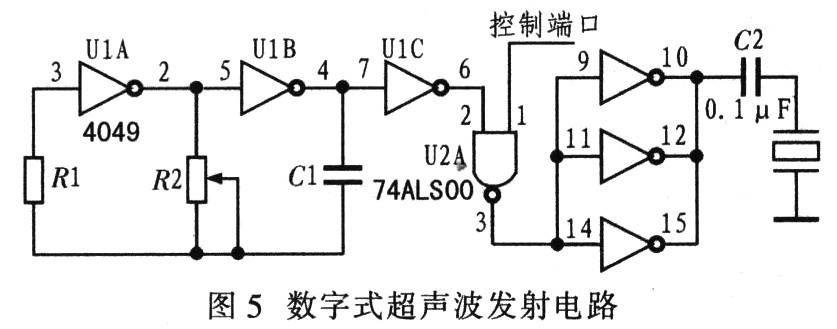
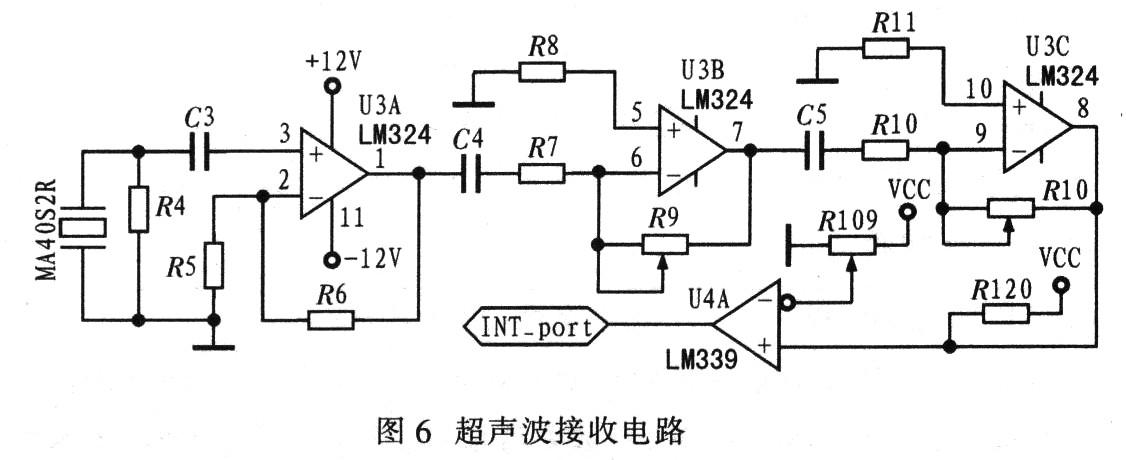
图6示出为超声波接收电路。超声波接收换能器采用MA40S2R,对换能器接收到的信号采用集成运算放大器LM324进行信号放大,经过三级放大后,通过电压比较器LM339将正弦信号转换为TTL脉冲信号。INT_Port与单片机中断管脚相连,当接收到中断信号后,单片机立即进入中断并对超声波信号进行处理和判断。
3 实时操作系统μC/OS—II的移植
μC/OS—II是一个嵌入式实时操作系统内核,包含了任务调度、任务管理、时间管理、内存管理和任务间的通信与同步等基本功能。μC/OS—II进行任务调度时,会把当前任务的CPU寄存器存放到该任务堆栈中,然后再从另一个任务堆栈中恢复原来的工作寄存器,继续运行另一个任务。
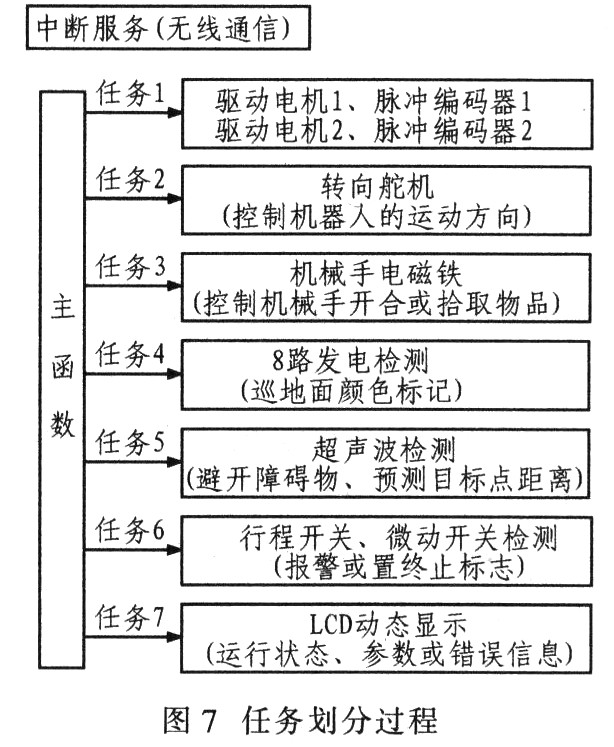
根据各个控制功能和微控制器的资源结构对任务进行划分,共划分为7个应用任务,其划分过程如图7所示。无线串行通信采用中断接收方式,保证数据接收的实时性。
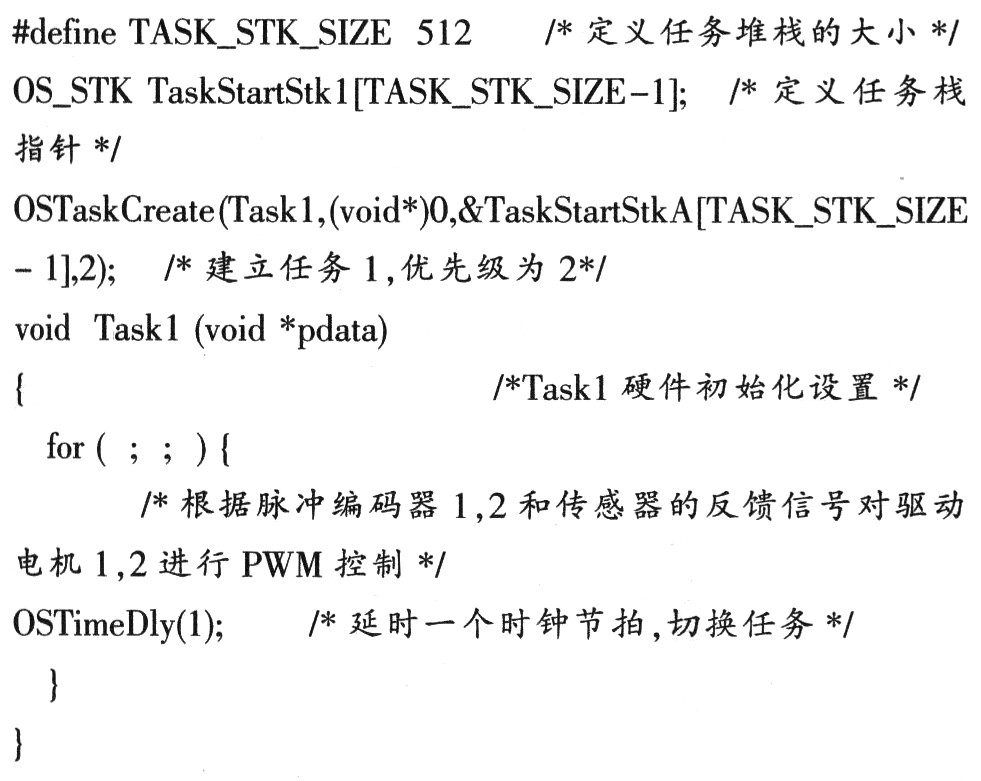
μC/OS一Ⅱ任务的建立包括定义任务堆栈、设定任务优先级、初始化该任务要求的系统硬件及实现具体的控制过程等4部分。现以任务1为例,介绍应用任务的建立过程。
在嵌入式实时操作系统环境下开发实时应用程序,可使程序的设计和扩展变得容易,而且无需大的改动即可增加新的功能。通过将应用程序分割成若干独立的任务模块,可大大简化应用程序的设计过程;而且能快速、可靠地对实时性要求苛刻的事件。通过有效的系统服务、嵌入式实时操作系统,能使系统资源得到更好的利用。
4 调试运行
在机器人控制系统起动时,μC/OS一Ⅱ对堆栈空间、各个控制寄存器和外设器件的硬件进行初始化,并设定当前各个功能部件的初始状态。
在实时机器人系统下,机器人正常启动后,系统实时监视机器人在比赛场上的运行状况,若出现某一动作或功能无效则给出出错信息。正常运行时实时显示机器人在比赛场上的坐标值和动作状态,如图8所示。
5 结语
根据智能机器人的控制要求,设计了基于无线通信的嵌入式机器人控制系统。在软件设计上移植了嵌人式实时操作系统μC/OS一Ⅱ。利用光电检测模块和超声波导航模块感知外部信息,实现了对智能机器人的控制。
- 基于ARM7软中断程序的设计(05-13)
- 基于ARM7的网关通信模块设计(08-24)
- 基于ARM7的MVB_CAN网关设计(03-25)
- ARM7串口9位方式多机遇信的编程技术(09-23)
- 你能用钱买到的最好的无人机(10-13)
- 超牛国外GPS无线导航避障谱乐演奏机器人(08-29)