基于ARM7软中断程序的设计
1 存储器部分原理
笔者在设计一项目时采用LPC2458。此CPU为ARM7内核,带512K字节的片内FLASH,98k字节的片内RAM,支持片外LOCAL BUS总线,可从片外NOR FLASH启动CPU。由于代码量较大,程序放在片外的NOR FLASH中。且存在片外NOR FLASH在运行程序时,需对片外的NOR FLASH擦写的需求。图1为存储部分框图。
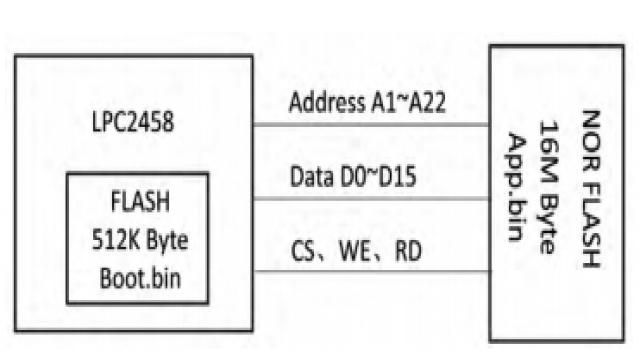
图1 存储部分原理框图
在设计中,片外NOR FLASH的大小为16M字节。其中2M规划为存放运行程序,剩余的空间用于产品运行日志,告警灯存储空间。因此存在着在程序运行时对片外NOR FLASH擦写的需求。如果程序正在正常运行的片外FLASH中去擦写FLASH,会存在总线冲突的问题,无法实现此功能。我们采用ARM7内核的SWI软中断功能来实现。
2 ARM软中断原理(SWI)
软中断(SWI)目前没有找到任何官方的正式定义。笔者尝试与硬中断对比定义如下:
1. 软中断发生的时间是由程序控制的,而硬中断发生的时间是随机的。
2. 软中断是由程序调用发生的,而硬中断是由外设引发的。
3. 硬中断处理程序要确保它能快速完成它的任务,这样程序执行时才不会等待较长的时间。
在C程序中调用软件中断需要用到编译器的扩展功能,使用关键字"_SWI"来声明中断函数。注意软中断号码同时在函数定义时指定。
_swi(0x24) void my_swi(void);
这样当调用函数my_swi的时候,就会用"SWI 0X24"来代替普通的函数调用"BL my_swi"。
可以发现软件中断同样存在着中断分支的问题,即需要根据中断号码来决定调用不同的处理程序。软中断号码只存在于SWI指令码当中,因此需要在中断处理程序中读取触发中断的指令代码,然后提取中断号信息,再进行进一步处理。下面是软中断指令的编码格式:
ARM状态下的SWI指令编码格式,32位长度,其中24位是中断编号。
Thumb状态下的SWI指令编码格式,16位长度,其中低8位是中断编号。
为了在中断处理程序里面得到SWI指令的地址,可以利用LR寄存器。每当响应一次SWI的时候,处理器都会自动保存并调整LR寄存器,使里面的内容指向SWI下一条指令的地址,所以把LR里面的地址内容上溯一条指令就是所需的间隔不一样,如果进入SWI执行前是在ARM状态下,需要通过LR-4来获得SWI指令地址,如果是在Thumb状态下进入,则只有LR-2就可以了。
下面是一段提取SWI中断号码的例程:
MRS R0,SPSR;检查进入SWI响应前的状态
TST R0,#T_bit;
LDRNEH R0,[LR, #-2];是Thumb,读回SWI指令码
BICNE R0, R0, #0xff00;提取低8位
LDREQ R0, [LR, #-4];是ARM,读回SWI指令码
BICEQ R0, #ff000000;提取低24位;
寄存器R0中的内容是正确的软中断编号了。
3 FLASH的CFI接口简介
在编程时,软件由于需要支持多个厂家不同型号的FLASH,因此在对FLASH擦写操作时,我们采用CFI接口。
CFI(Common Flash Interface)是JEDEC制定的一个接口,用来帮助程序读取FLASH的制造商ID和设备ID,确定FLASH的大小,获得FLASH的各个物理特性,比如BLOCK的擦除时间等等。主要的功能是使得软件和硬件升级更加方便,不同厂家之间的硬件兼容性更好,可以实现底层硬件的互换。项目使用的FLASH命令定义列表如表1所示。
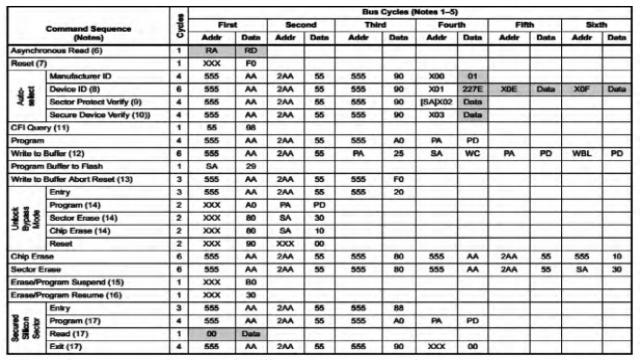
表1 NOR FLASH命令定义列表
4 实现方案
4.1 SWI实现接口程序
如图1所示,LPC2458内部的FLASH存放boot程序,外部的FLASH存放应用程序。在需要擦写外部FLASH时,由应用程序产生一个软中断,使程序跳到内部FLASH中运行。CPU不再从片外FLASH中取指令,因此可擦写片外FLASH。当软中断程序运行完毕后,程序又跳回片外FLASH中。
由于SWI软中断中传送参数比较麻烦,我们的SWI软中断程序仅返回处理函数的地址,获得地址后,重定义为函数地址指针的方法简化处理,使程序的可读性和维护性增强。
我们以FLASH的写函数举例说明采用SWI方式的流程。
//定义函数指针类型
typedef unsigned long (*FuncWR_t)(unsigned long, void *, unsigned long);
//定义写FLASH函数,调用软中断
unsigned long Write_Flash(unsigned long StartAddr, unsigned short* DataPtr, unsigned long Count)
{
Extern unsigned long __swi(3) Get_Write_Addr(void);
FuncWR_t Func; //定义一个函数指针
Func = (FuncWR_t)Get_Write_Addr();
return
- 基于无线通信的嵌入式机器人控制系统设计(03-26)
- 基于ARM7的网关通信模块设计(08-24)
- 基于ARM7的MVB_CAN网关设计(03-25)
- ARM7串口9位方式多机遇信的编程技术(09-23)
- 基于对数放大器和MCU增强RF功率测量精度(03-26)
- 解读车载AM/FM收音机电路(04-21)