基于无线通信的嵌入式机器人控制系统设计
1 引言
轮式移动机器人是机器人研究领域的一项重要内容,它集机械、电子、检测技术与智能控制于一体,是一个典型的智能控制系统。智能机器人比赛集高科技、娱乐、竞技于一体,已成为国际上广泛开展的高技术对抗活动。现以ARM7处理器为控制核心,采用无线通信技术,并移植嵌入式实时操作系统μC/0S一Ⅱ设计了一套智能机器人控制系统。
2 硬件设计
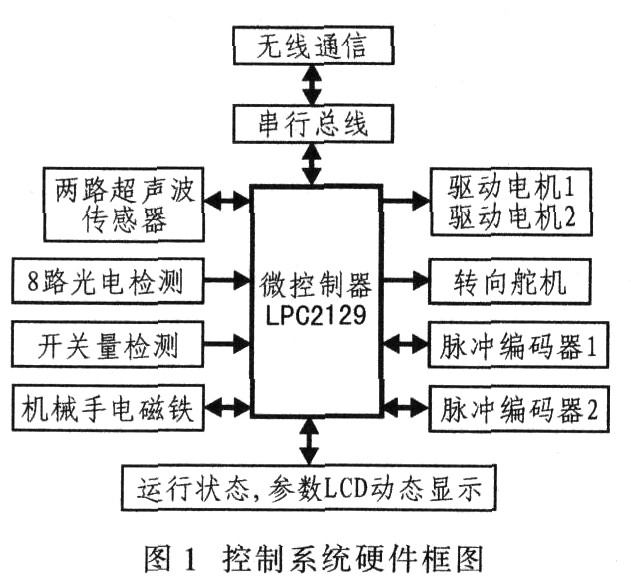
根据竞技机器人的功能要求进行总体设计,将各个功能进行模块化,其控制系统硬件框图如图1所示。中央处理器采用微控制器结构,用以控制外围设备协调运行。舵机控制机器人的运动方向;驱动电机电动机采用输出轴配有光电编码器的小型直流电机驱动车轮旋转。电磁铁作为机械手夹紧的执行元件。设置了两路超声波传感器、8路光电检测输入和8路开关量检测接口。整个机器人的运行状态和运行参数通过LCD动态显示。
2.1 微控制器的选型
机器人要实现的动作和功能较多,需要多个传感器对外界进行检测,并实时控制机器人的位置、动作和运行状态。系统中的所有任务最终都挂在实时操作系统μC/0S一Ⅱ上运行,因此不仅要考虑微控制器的内部资源,还要看其可移植性和可扩展性。LPC2129是Philips公司生产的一款32位ARM7TDMI—S微处理器,嵌入256 KB高速Flash存储器,它采用3级流水线技术,同时进行取指、译码和执行,而且能够并行处理指令,提高CPU的运行速度。由于它的尺寸非常小,功耗极低,抗干扰能力强,适用于各种工业控制。2个32位定时计数器、6路PWM输出和47个通用I/0口,所以特别适用于对环境要求较低的工业控制和小型智能机器人系统。因此选用LPC2129为主控制器,可以获得设计结构简单、性能稳定的智能机器人控制系统。
2.2 无线通信接口设计
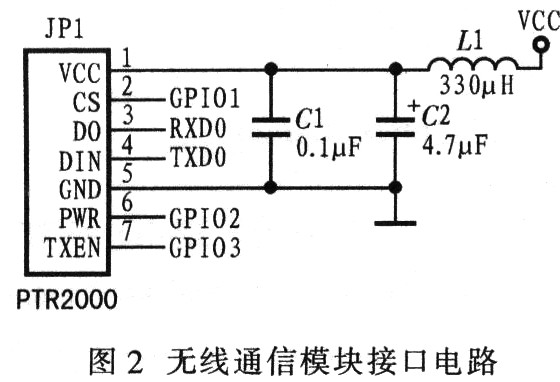
系统采用迅通公司生产的PTR2000无线通信数据收发模块。电路接口如图2所示。该模块基于NORDIC公司生产的射频器件nRF401开发,其特点是:①有两个频道可供选择,工作速率高达20 Kb/s;②接收发射合一,适合双工和单工通信,因而通信方式比较灵活;③体积小,所需外围元件少,接口电路简单,因此特别适合机器人小型化要求;④可直接接单片机串口模块,控制简单;⑤抗干扰能力强;⑥功耗小,通信稳定。
2.3 光电检测模块设计
2.3.1 光电检测过程
设计光电检测模块,使机器人能够检测地面上的白色引导线。光电检测电路主要包括发射部分和接收部分,其原理如图3所示。发射部分的波形调制采用了频率调制方法。由于发光二极管的响应速度快,其工作频率可达几兆赫兹或十几兆赫兹,而检测系统的调制频率在几十至几百千赫兹范围之内,因此能够满足要求。光源驱动主要负责将调制波形放大到足够的功率去驱动光源发光。光源采用红外发光二极管,工作频率较高,适合波形为方波的调制光发射。
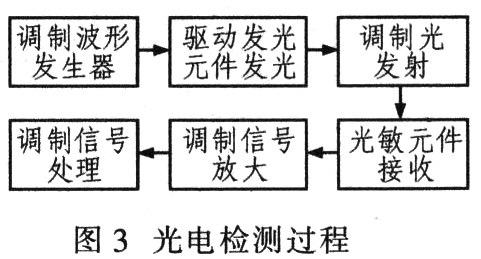
接收部分采用光敏二极管接收调制光线,将光信号转变为电信号。这种电信号通常较微弱,需进行滤波和放大后才能进行处理。调制信号的放大采用交流放大形式,可以将调制光信号与背景光信号分离开来,为信号处理提供方便。调制信号处理部分对放大后的信号进行识别,判断被检测对象的特性。因此,该模块的本质是将“交流”的、有用的调制光信号从“直流”的、无用的背景光信号中分离出来,从而达到抗干扰的目的。
2.3.2 光电探头
在机器人底盘前部安装有光电探头,共设置了5个检测点,其结构如图4所示。
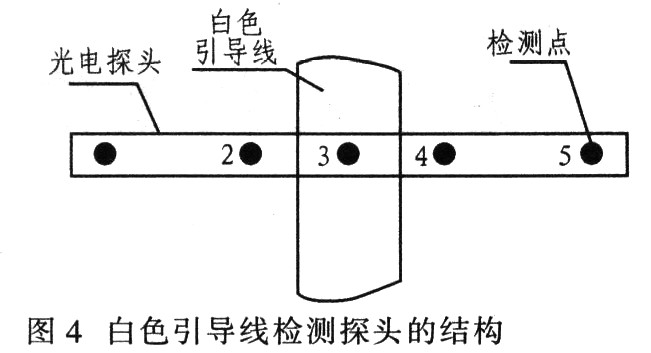
从理论上讲,检测点越多,越密,识别的准确性与可靠性越高。但是硬件的开销与软件的复杂程度也相应增加。采用该寻线系统保证了检测的精确度,也节约了硬件的开销。发光二极管发出的调制光经地面反射到光敏二极管。光敏二极管产生的光电流随反射光的强弱线性变化。检测出这种变化,即可判断某一个检测点是否在白色引导线的上方,从而判断机器人和白色引导线的相对位置。
2.4 超声波测距传感器设计与实现
两路超声波传感器用以控制机器人避开障碍物,并预测机器人相对目的地距离,起导航作用,其接收部分与微控制器的捕获和定时管脚相连接。整个超声波检测系统由超声波发射、超声波接收和单片机控制等部分组成。发射部分由高频振荡器、功率放大器及超声波换能器组成。经功率放大器放大后,通过超声波换能器发射超声波。
图5给出由数字集成电路构成的超声波振荡电路,振荡器产生的高频电压信号通过电容C2隔除掉了信号中的直流量并给超声波换能器MA40S2S。其工作过程:U1A和UlB产生与超声波频率相对应的高频电压信号,该信号通过反向器U1C变为标准方波信号,再经功率放大,C2隔除
- 基于ARM7软中断程序的设计(05-13)
- 基于ARM7的网关通信模块设计(08-24)
- 基于ARM7的MVB_CAN网关设计(03-25)
- ARM7串口9位方式多机遇信的编程技术(09-23)
- 你能用钱买到的最好的无人机(10-13)
- 超牛国外GPS无线导航避障谱乐演奏机器人(08-29)