采用MC9RS08KA2的高亮发光二级管应用
比,从相应地补偿VIN a的变化,而令输出电流保持一个恒定水平。
软件控制回路
KA2没有专用的PWM模块。在软件设计的主循环中,可以监控来自RSENSE的反馈电压,并产生PWM控制的波形作为SW1的开关操作。PWM打开状态和关闭状态的长短由芯片定时器溢出的时间确定。
图5显示了一般的软件控制流程。重启后,MCU开始初始化程序。PWM打开时间初始化为它的最小值。主控制回路保存两个变量:打开时间和关闭时间变量。这两个变量按相反方向调节,以便将整体时间长短保持在恒定水平。打开时间和关闭时间一同确定可调节的占空比,该值和软件开销共同定义PWM周期的长短。
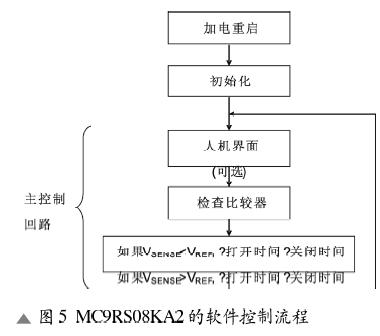
任何用以执行其它功能(如亮度调节)的人机界面都可以添加到软件的主控制循环上。添加的软件编码被视为软件开销,会影响整体PWM输出周期的长短。
PWM输出周期长短应保持恒定,由要控制循环中执行的CPU周期总数确定。所需的PWM频率越高,主控制循环的编码预算越低。例如,如果PWM频率要求为50KHz,KA2允许的最大总线频率为10MHz,在这种情况下主控制循环必须保持在200个CPU周期。该数字包括软件开销及SW1打开时间和关闭时间的总和(也就是可调节的占空比)。比如说,如果打开时间和关闭时间总和为128个CPU周期,则200个周期中的72个就成了软件开销,该主循环的可控制占空比范围则为72/200=36% 到100%。
结语
基于MCU的解决方案可为应用提供全面灵活性。目前,即使最低端的8位MCU都具有足够的CPU带宽,不仅能执行DC-DC操作,还可以在应用中增加更多功能而几乎不需要增加成本。MCU的设计目标是实现全面的解决方案。飞思卡尔提供的MCU亦支援各种通信标准,如射频(RF)连接领域的Zigbee 、有线连接领域的LIN、CAN和DMX512等,这为LED照明提供了巨大的应用空间。
- 飞思卡尔TSSMCU: 面向微控制器的Xtrinsic触摸传感(02-22)
- 飞思卡尔Xtrinsic MPL3115A2智能压力传感器(02-22)
- 飞思卡尔MMA955xL: Xtrinsic运动感应平台(02-22)
- 探究现代数字调制技术(04-09)
- 用于SOC或块级时钟的可配置分频器(12-06)
- 基于MHVIC2115的射频功率放大器设计(12-02)