用于高速ADC的低抖动时钟稳定电路的设计
0 引言
近年来,由于半导体技术、数字信号处理技术及通信技术的飞速发展,A/D、D/A转换器近年也呈现高速发展的趋势。随着数字信号处理技术在高分辨率图像、视频处理及无线通信等领域的广泛应用,对高速、高精度、基于标准COMS工艺的可嵌入式ADC的需求日益迫切。此外对于正在兴起的基于IP库设计和片上系统(SOC)集成研究来说,对低功耗、小面积、低电压以及可嵌入设计的ADC核心模块需求更甚。
由于高速、高精度A/D转换器(ADC)的发展,尤其是能直接进行中频采样的高分辨率数据转换器的上市,对稳定的采样时钟的需求越来越迫切。随着通信系统中的时钟速度迈人吉赫兹级,相位噪声和时钟抖动成为模拟设计中十分关键的因素。
为了保证电子系统的数据采集、控制反馈和数字处理的能力和性能,现代军用电子系统对A/D转换器的要求也越来越高。尤其是军事数据通信系统、数据采集系统对高速、高分辨率A/D转换器的需求在不断增加,时钟占空比稳定电路作为高速、高精度A/D转换器的核心单元,对转换器的信噪比(RSN)和有效位(ENOB)等性能起至关重要的作用,要保证高速、高精度A/D转换器的性能,必须首先保证采样编码时钟具有合适的占空比和很小的抖动。
1 时钟稳定电路
相位噪声和抖动是对同一种现象的两种不同的定量方式。在理想情况下,一个频率固定的完美的脉冲信号(以1 MHz为例)的持续时间应该恰好是1μs,每500 ns有一个跳变沿,但这种信号并不存在。如图1所示,信号周期的长度总会有一定变化,从而导致下一个沿的到来时间不确定。这种不确定就是相位噪声,或者说是抖动。
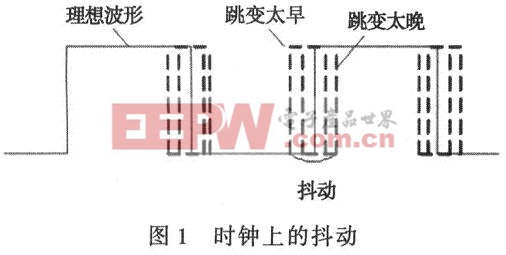
抖动是对信号时域变化的测量结果,它从本质上描述了信号周期距离其理想值偏离了多少。通常,10 MHz以下信号的周期变动并不归入抖动一类,而是归入偏移或者漂移。数据转换器的主要目的要么是由定期的时间采样产生模拟波形,要么是由一个模拟信号产生一系列定期的时间采样。因此,采样时钟的稳定性是十分重要的。从数据转换器的角度来看,这种不稳定性,亦即随机的时钟抖动,会在模数转换器何时对输入信号进行采样方面产生不确定性。
从数据转换器的角度来看,编码带宽可扩展到数百兆赫。在考虑构成数据转换器时钟抖动噪声的带宽时,其范围是从直流到编码的带宽,这远远超过制造商常常当作标准时钟抖动测量值引用的12kHz~20 MHz典型值。由于与抖动有关的是宽带转换器噪声增大,所以只要观察数据转换器噪声性能的下降,就可很方便地评估时钟抖动。式(1)可确定由于时钟抖动而产生的信噪比(RSN)极限

式中:f为模拟输入频率;t为抖动。求解t则式(1)变为式(2)。如果已知工作频率和RSN要求,则式(2)就可确定时钟抖动要求
只要在模拟输入频率增大时观察到信噪比下降,就可以很方便地使用数据转换器(特别是模数转换器ADC),通过快速傅里叶变换(FFT)技术计算出信噪比。从总噪声中减去ADC产生的噪声,就可以估算出时钟抖动产生的噪声,一旦知道噪声系数,就可以计算出时间抖动。
ADI产品与其他公司产品相比之所以能提高采样性能,主要得益于对DCS电路的改进。DCS电路担负着减小时钟信号抖动的作用,而采样时序就取决于时钟信号。各家公司过去的DCS电路只能将抖动控制在0.25 ps左右,而高性能新产品AD9446和LTC2208则将抖动降低到50 fs左右。通常降低抖动就能够改善信噪比,这样便提高了有效分辨率(ENOB:有效比特数),从而在达到16 bit量子化位数的同时,实现100 Msps以上的采样速率。如果不控制抖动就提高采样速率的话,将降低ENOB,无法获得希望的分辨率,也无法提高量子化位数。随着高性能A/D转换器的发展,DCS电路向更高速度、更小抖动和稳定方向发展。
目前,国外几个大公司所设计的A/D转换器中时钟占空比稳定电路的指标如表1所示。由于国内高速、高精度A/D转换器的设计技术、工艺技术和测试技术与国外先进水平还有一定的差距,同时研制的时钟稳定电路性能指标还不理想,目前正在研制的时钟占空比稳定电路频率为65 Msps,抖动为2 ps。

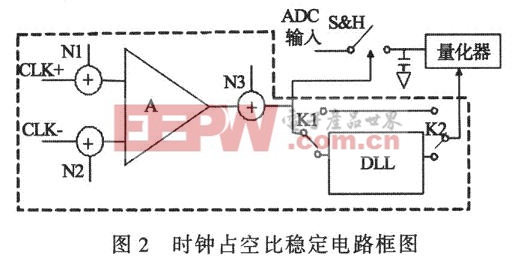
时钟占空比稳定电路框图如图2虚框所示,它由输入缓冲放大器A,开关Kl、K2和DLL组成。
缓冲放大器A实际上只是对时钟信号进行缓冲。当采样时钟频率低于DLL工作下限时,开关K1、K2向上闭合,DLL被旁路;开关K1、K2向下闭合,DLL开始作用,调节输入时钟信号相位。由于DLL具有延迟锁相的功能,因此能很好地控制时钟占空比,本设计中通过下文的具体电路能使输入时钟的占空比接近50%,抖动小于0.5 ps。
延迟锁相环在普通锁相环(PLL)的基础上,用电压控制延迟线代替了压控振荡器,其结构
高速A D转换器 延迟锁相环 占空比稳定 时钟抖动 相关文章:
- 8位高速A/D转换器TLC5510的应用(02-16)
- 用差分放大器来驱动高速ADC(03-28)
- 一种用于高速ADC的采样保持电源电路的设计(10-21)
- 高速ADC的性能测试(08-26)
- 高速ADC电源设计方案(08-28)
- 基于高速ADC的脉冲测量(12-08)