基于GPS/INS实现某自行高炮导航系统的改造设计

其中:ea是记忆衰减因子,a≥O,其大小根据测量值与滤波器的工作状态加以调整,当滤波器偏离最优状况时,调整a值能够自适应地调节卡尔曼滤波器。当a=0时,就是标准卡尔曼滤波器。
由此可得卡尔曼滤波器增益矩阵为:
在式(8)中,令vk=Zk-Zk,即为信息向量,它反映了滤波模型与观测数据的匹配程度。
4.3 初始化和初始对准
系统工作流程首先是初始化。主控机装入系统的方位角参数,初始化系统的位置、速度以及系统状态噪声方差阵和量测噪声方差阵。为组合计算、初始对准、数据融合等解算过程提供初始参数。这些参数有些根据现场环境而定,如位置、速度、加速度等;有些参数经试验确定,如状态误差协方差阵、量测误差协方差阵等;有些参数需计算确定,如初始姿态矩阵。
初始化完毕后进行初始对准。初始对准是系统正式工作前的准备阶段,其包括粗对准和精对准两个阶段。粗对准由上位机传递提供方位粗值,精对准采用精基座传递对准,通过主控机传递实时速度量测值对姿态误差等状态进行滤波估计并修正失准角,当失准角精度达到要求后,输出对准完成信号。
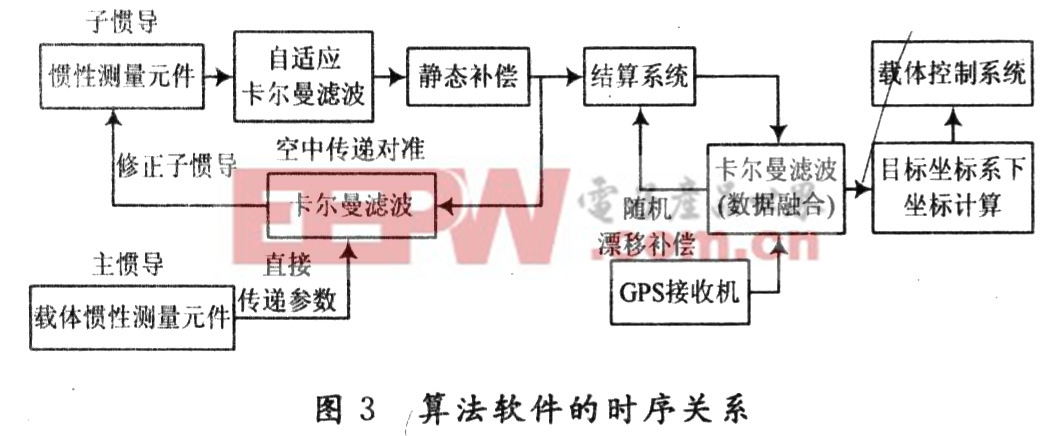
4.4 时序关系
由于系统内各种误差源的存在,使得系统存在积累误差,从而不能保证系统在较长的工作时间内时钟以较高的精度给出导航参数。在这些误差源中,惯性测量装置的漂移是其主要的误差源,它可以分为确定性漂移和随机性漂移两大类。确定性漂移可以在陀螺使用前通过一定的测量方式和设备对其测试,进而对其补偿。然而随机性漂移的模型是不确定的,无法像确定性漂移那样进行准确的测试补偿,因而成为系统的主要误差源。能否对惯性测量装置的随机漂移进行有效的估计和补偿,是提高组合导航系统精度的重要途径。时序关系如图3所示。
5 结 语
为实现上述功能,GPS/INS组合导航系统开发平台采用成熟的计算机软硬件技术建立物理开发平台,采用设计语言,对组合导航系统的数据C++ Builder程序流程、控制结构和功能技术进行分析,建立了软件结构上的系统框架。系统的成功研发将有效地提高战车导航系统的性能。
- 车载GPS智能终端的设计与实现(03-04)
- 智能型手机电源管理系统的设计(05-05)
- GPS高精度的时钟的设计和实现(10-13)
- 意法半导体提升手机内部保护功能,为环保充电器开路(01-26)
- 完整两节AA电池/USB电源管理器(03-18)
- 飞兆半导体面向便携设计推出紧凑型背光照明解决方案(03-01)