基于GPS/INS实现某自行高炮导航系统的改造设计
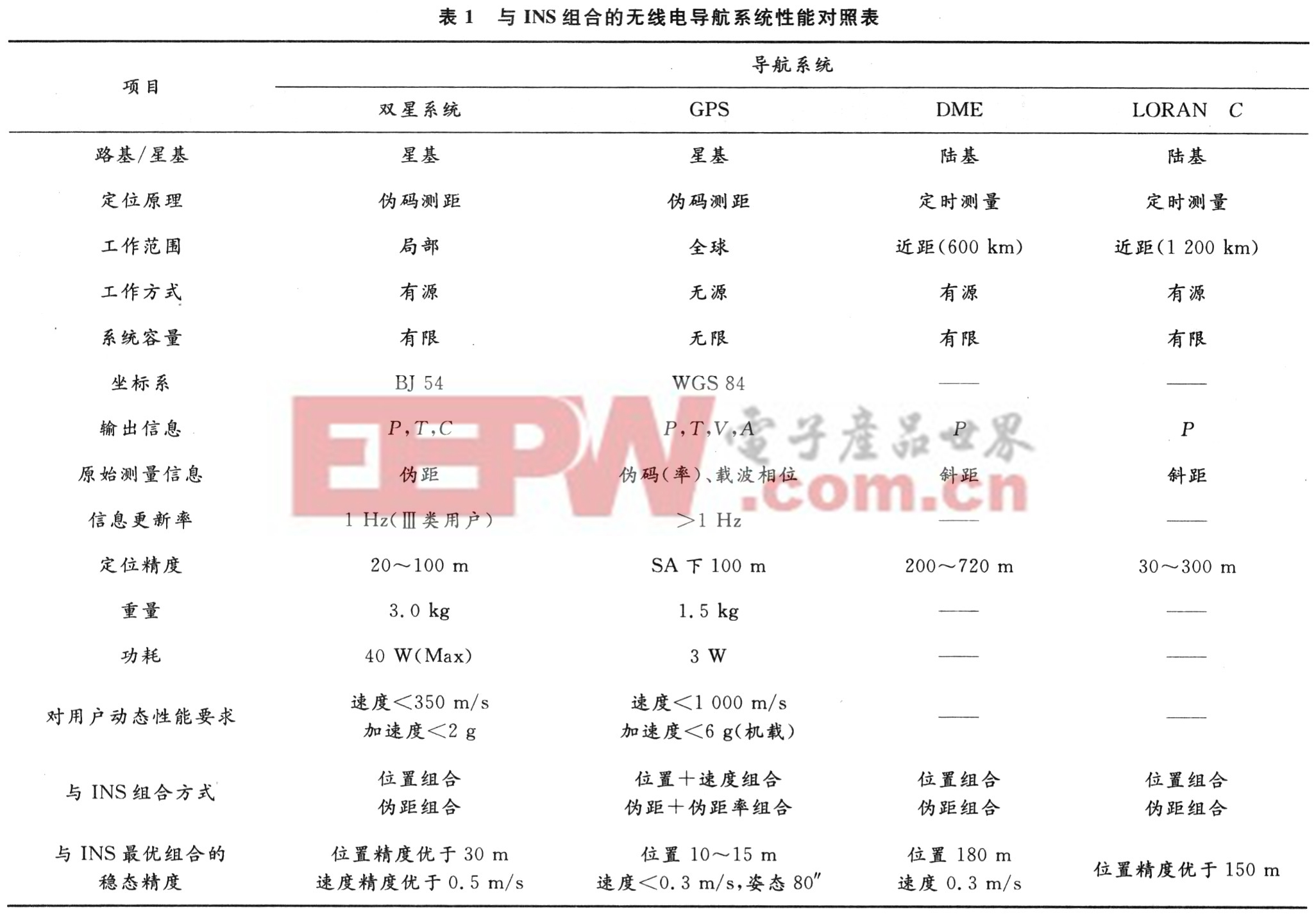
某自行高炮武器系统是我军现役装备,其通过INS(惯性导航系统)对战斗车行军作战进行导航。INS是一种自主式导航系统,它不依赖外界信息即可获得载体的姿态、速度和方位信息,抗干扰能力强,而且不向外界辐射电磁信息,隐蔽性好。但随着时间的延续INS的定位误差不断积累,漂移变大。GPS广泛用于地球表面移动目标的跟踪定位,特别是在美国取消SA限制后,GPS可以高精度、实时、连续地实现导航,由于GPS是一种非自主导航系统,在动态环境下或受遮拦时容易出现“丢星”现象而导致定位中断,抗干扰能力低,更新率不高。可以看出,INS和GPS具有很强的互补特性,将两者结合起来将大大提高该武器系统的作战效能。表1为与INS组合的几种无线电导航系统的性能比较对照表。
1 INS工作原理
INS是通过IMU(惯性测量组件)测量载体相对惯性空间的角速度和加速度,并根据牛顿运动定律对其进行时域积分并转换到导航坐标系中,从而推算出载体的瞬时速度、偏航角和位置等导航信息,如图1所示。
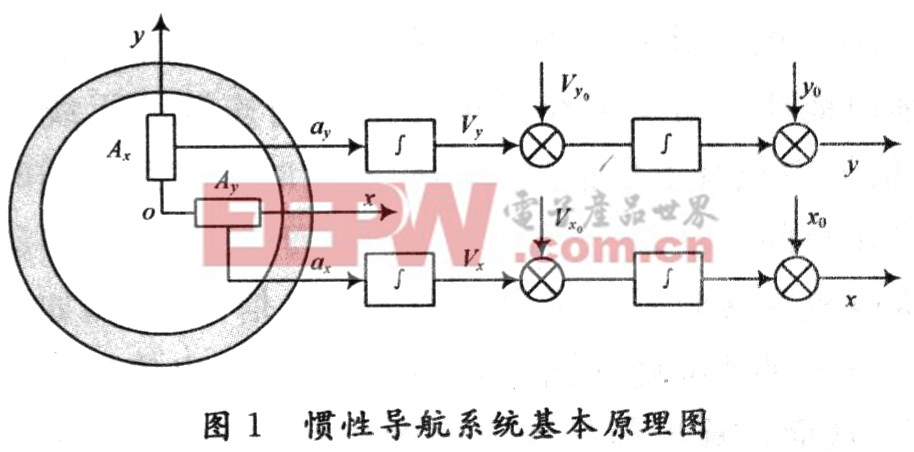
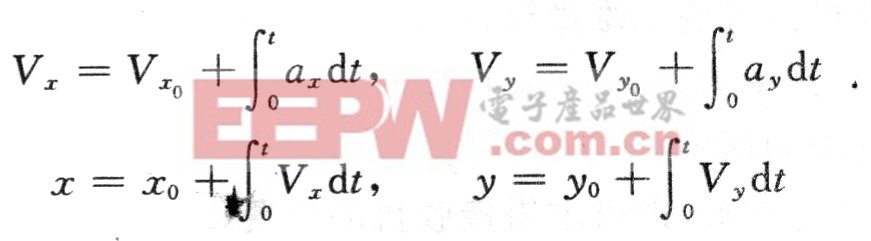
取xoy为定位坐标系,载体的瞬时位置为(x,y),如果在载体内用一个导航平台把2个加速度计的测量轴分别稳定在x和y轴向,则加速度计分别测量载体,x和y轴的相对惯性空间的运动加速度,经导航计算机的运算得到载体的航行速度Vx,Vy,,故有:
若经纬度为α,β,x正向为北,y正向为东,地球半径为R,则用经纬度表示位置信息为:

注:P为位置;V为速度;T为时间;A为姿态;c为通信。
2 GPS工作原理
GPS的工作原理如下:围绕地球运转的人造卫星连续向地球表面发射经过编码调制的连续波无线电信号,信号中载有卫星信号准确的发射时间以及不同时间卫星在空间的准确位置(星历)。位于载位上的卫星导航接收机在接收到卫星发射的无线电信号之后,如果他们有与卫星钟准确的同步时钟,便能测量出信号的到达时间,从而估算出信号在空间的传播时间,再利用这个传播时间乘以信号在空间的传播速度便能求出接收机与卫星之间的距离。即:

式中:R为卫星与接收机之间的距离;(x0,y0,z0)表示接收机位置的三维坐标;(x,y,z)表示卫星位置的三维坐标。其中R,(x,y,z)已知,(x0,y0,z0)未知。如果接收机能同时测出与三颗卫星的距离,则构成三个方程式,联立求解,即可求得接收机的位置(x0,y0,z0)。
高精度的卫星导航系统地面接收装置不断跟踪卫星,算出它们近期的准确轨道,并且不断测量出卫星所载原子钟的微小误差,以使卫星播发的位置和时间一直保持着很高的精度。然而普通的接收机不可能有十分准确的时钟,因此由它测出的卫星信号在空间的传播时间不准确,进而导致接收机与卫星的距离不准确,这种距离叫做伪距(PR)。但是在接收卫星信号的瞬间,接收机的时钟与卫星导航系统所用时钟的时间差是一个定值,假设为△t,则式(1)改写为:

如果接收机能测出距四颗星的伪距,联立四个方程既能求解接收机的位置并告诉它准确的时间差。当载体不运动时,由于卫星在运动,接收到的卫星信号的载频中会有多普勒频移,这个频移的大小和正负是根据卫星的星历、时间以及载体本身的位置计算求得。然而如果载体本身运动,则这个多普勒频移便要发生变化,其大小和正负取决于载体运动的速度和方向,根据这个变化,可以求得载体的三维运动速度。这样,GPS就可以为用户提供准确的三维位置、三维速度和时间信息。
3 GPS/INS组合导航系统模型
组合导航系统的结构如图2所示。
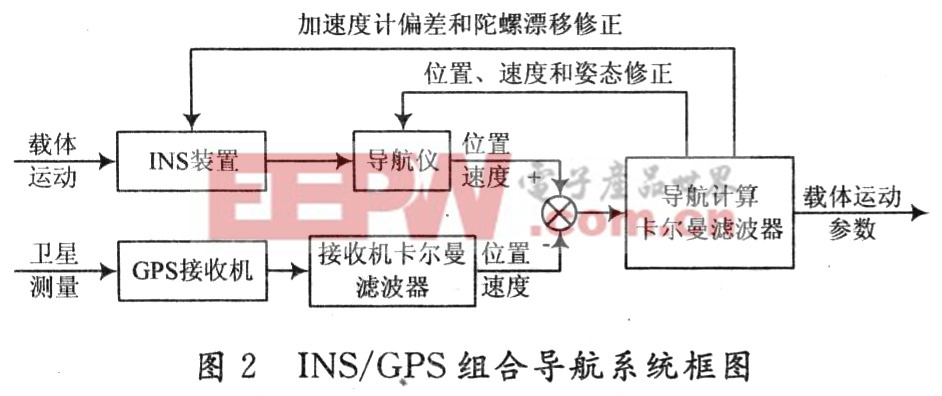
利用GPS调整INS的输出,即GPS输出位置和速度信息直接调整INS的漂移误差,得到精确的位置、速度和方向信息。当GPS正常工作时,系统输出为GPS信息;当GPS中断时,INS以GPS中断时的瞬时值为初值继续工作,系统输出为INS信息,直到GPS工作正常为止。这种组合的特点是GPS和INS保持了各自的独立性,其中任何一个出现故障时,系统仍能继续工作;组合定位系统结构简单,便于设计。GPS接收机和INS开发和凋试独立性强,便于系统故障的检测和排除。
采用图2所示结构的INS/GPS组合系统数学模型为:

其中:x是INS的误差状态向量;Wk和Vk分别是系统噪声和量测噪声,它们都是高斯白噪声,即Wk~N(0,Q),Vk~N(O,R),Q和R分别是系统噪声方差阵和量测噪声方差阵。
4 关键技术
4.1 时间同步
GPS/INS组合导航系统利用GPS的位置、速度信息对惯导系统进行修正,关键是保证用于修正的导航数据在数据融合时间点的一致。
INS的采样频率由采样板的高精度时钟控制,可认为是固定不变的。GPS接收机严格地在每一个同步脉冲(Pulse Per Second,PPS)的边沿时刻进行一次伪距和载波相位测量、GPS标准授时、定位等,但经过计算及串口通信后,输出信息的时钟发生不确定的延迟。因此,系统设计采用如下的时间同步方法:将PPS作为CPU的外部中断源,PPS触发中断后,CPU查询此时采样板采样数n1;GPS的导航信息按照通信协议以中断方式通过RS 485传送,当通信协议中数据帧尾字节接收完成后,CPU再次查询采样板采样数n2;两次采样数之差n1-n2与采样频率之比即对应了GPS相对INS的时标延迟;以线性插值法近似处理,对位置、速度进行补偿,在数据帧尾字节接收完成时间点实现位置、速度修正。这样可以将时间同步误差控制在允许范围以内。
4.2 卡尔曼滤波器的实现
本文使用指数加权的自适应衰减卡尔曼滤波算法,基本思想是先分散处理,再全局融合。即在非相似子系统中选择一个信息全面、输出速率高、可靠性绝对保证的子系统作为公共参考系统,与其他子系统融合,获得建立在所有测量基础上的全局估计。这样的设计结构使得融合后的滤波器精度更高,从而使整个系统的容错能力提高。其作用机理是:当卡尔曼滤波至k时刻,如果发现滤波异常,则滤波模型已不适应当前实际系统。因此对k时刻的方差阵乘以指数函数ea(a≥0),从而使滤波增益增大,使滤波适应当前系统。定义卡尔曼滤波中的一步预测均方误差阵为:
- 车载GPS智能终端的设计与实现(03-04)
- 智能型手机电源管理系统的设计(05-05)
- GPS高精度的时钟的设计和实现(10-13)
- 意法半导体提升手机内部保护功能,为环保充电器开路(01-26)
- 完整两节AA电池/USB电源管理器(03-18)
- 飞兆半导体面向便携设计推出紧凑型背光照明解决方案(03-01)