基于舰船辐射噪声的舰船目标定位技术

ψc(x)的k(k>0)阶导函数表示为ψc(k)(x),k阶积分函数为ψc(-k)(x),其中,定义ψ(0)c(x)=ψc(x)(积分下限0可为任意值,但必须固定)。可以得到下式:

这说明,使用 可以通过最大化代价函数而由有噪观测数据估计独立分量。这里称统计量
可以通过最大化代价函数而由有噪观测数据估计独立分量。这里称统计量 为数据的高斯矩。因此,估计有噪ICA模型可以通过对拟白化后的数据x最大化如下的代价函数来实现:
为数据的高斯矩。因此,估计有噪ICA模型可以通过对拟白化后的数据x最大化如下的代价函数来实现:
其中X 对于式(5)进行优化求解,可得到改进形式的定点算法。可将无噪时的所有期望(高斯矩),由相应的一致估计(有噪数据的高斯矩)代替。因此,可得到拟白化数据的定点迭代的初步形式:
对于式(5)进行优化求解,可得到改进形式的定点算法。可将无噪时的所有期望(高斯矩),由相应的一致估计(有噪数据的高斯矩)代替。因此,可得到拟白化数据的定点迭代的初步形式:

其中w*是w的更新值,在每次迭代后被归一化。在每步迭代之前,调节c使 可简化式(6)的算法。最后可得拟白化数据关于偏差消除的定点算法:
可简化式(6)的算法。最后可得拟白化数据关于偏差消除的定点算法:

其中w*是w的更新值,在每次迭代后被归一化。上述的公式每次只能得到一个独立分量,使用与无噪时相同的去相关方法,就求得所有的独立分量,从而完成分离工作。
3.2 时差估计
在完成盲分离处理后,就可以得到源信号的恢复形式。相关计算的工作就是估计两组阵列接收源信号之问的延迟△τ。对于同一个辐射源信号,由于到达位置的不同,接收到的时间也不同,这种情况下,就必须在时移中考虑两个信号的相似性,把s2(n)延迟时间τ使之变为s2(n一τ),考察s2(n)与s2(n一τ)的相似性,即计算其相关系数rs1s2:

当τ从一∞到+∞时,rs1s2(τ)就是τ的一个函数,称rs1s2(τ)为s1(n)与s2(n-τ)的互相关系数,τ为s2(n-τ)的延迟时间,若|rs1s2(τ)|在τ0达到最大值,则τ0为这两个信号的时差即△τ。
3.3 定位计算
假设目标声源T到达阵元S1、S2、S3、S4相对与到达阵元S0的时差分别为τ01,τ02,τ03,τ04,可以得到其定位方程:
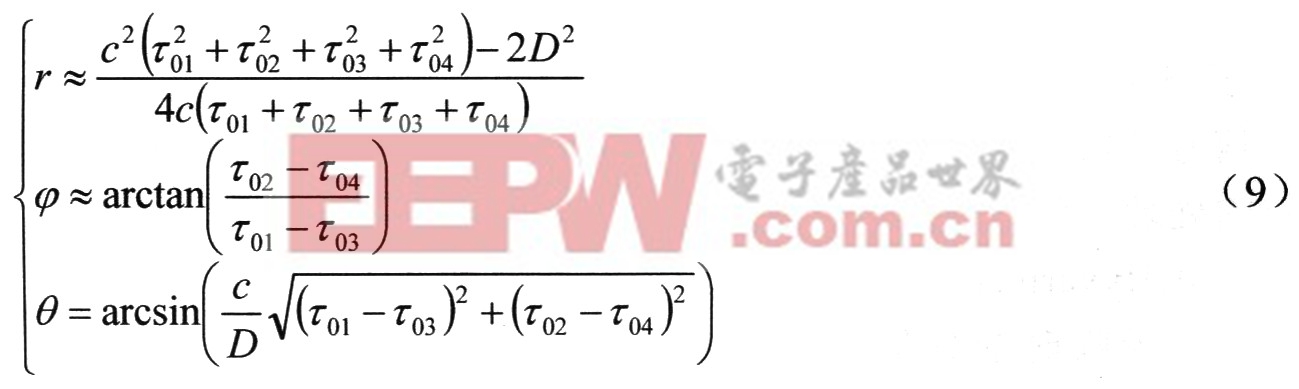
c为声速,这里取c=340.29m/s,在直角坐标系中,目标声源T的位置坐标(x,y,z)与球坐标系的位置坐标(r,ψ,θ)的关系式为:

式中0°≤θ≤90°,O°≤ψ≤360°。由式(9)可知,与定位相关的量包括时差τ01,τ02,τ03,τ04,阵元间距D以及声速c有关,由于在一定的阵列和环境中,阵元间距D和声速c相对固定,这里可视为常数,因此定位精度主要取决于时差的估计精度,这里设时差估计精度为dτ。对式(9)求相对时差τ01,τ02,τ03,τ04的偏导,相应估计值的标准偏差可表示为:

由式(11)可知,定位参量估计值与时差估计精度dτ、阵元间距D、声速c、俯仰角θ和目标真实距离r有关,结合式(10),对定位相关的三个坐标变量求偏导,可得:

定位误差则可表示为:
4 仿真实验
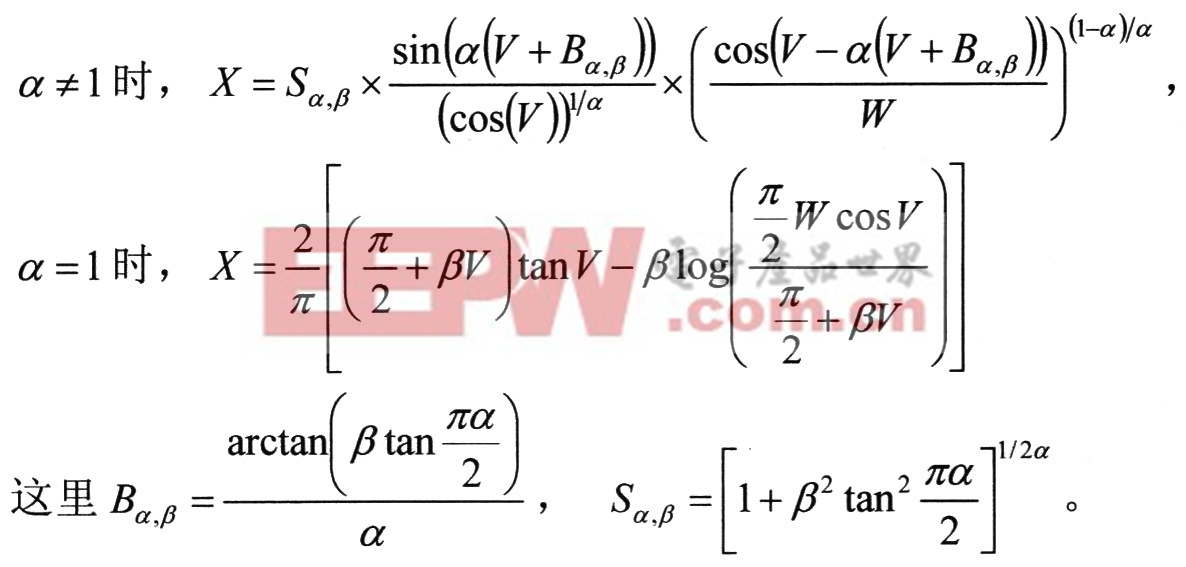
为验证算法的有效性,下面分别就直接相关、广义相关和基于盲分离的直接相关方法进行一系列的实验。由图l建立的接收模型可知,延迟时间为50个采样间隔。接收的主要源信号包括一路舰船实测信号,一路服从α稳定分布的尖峰脉冲噪声,见图2。服从α稳定分布的随机变量如下产生:分别产生两个独立的随即变量V和W,其中,V满足在(一π/2,π/2)范围内均匀分布,W满足均值为l的指数分布。

试验过程如下:首先对接收信号直接进行相关处理,结果如图3的第一排所示,相关易出现多个极值且有偏差,从而使得到的结果并不准确。其次,将接收信号经盲信号处理后的进行处理相关,相关峰非常明显,结果如图3的第二排所示。通过改变噪声的影响,对每个噪声点分别进行了1000次实验,结果(如图4所示)证明:经盲相关处理后对延迟时间估计的结果远比直接进行相关、广义相关方法估计的结果要准确和稳定,达到一定的信噪比后,正确估计的概率几乎为100%,广义相关方法相比直接相关的正确概率有一定的提高,显然还是存在一定的误差。由实验结果可知:在复杂信号环境中,最好的方式是先将信号提取出来再进行相关处理,否则,时差估计的精度和稳定性将很难提高,进而影响定位精度及其稳定性。这里信噪比定义为:

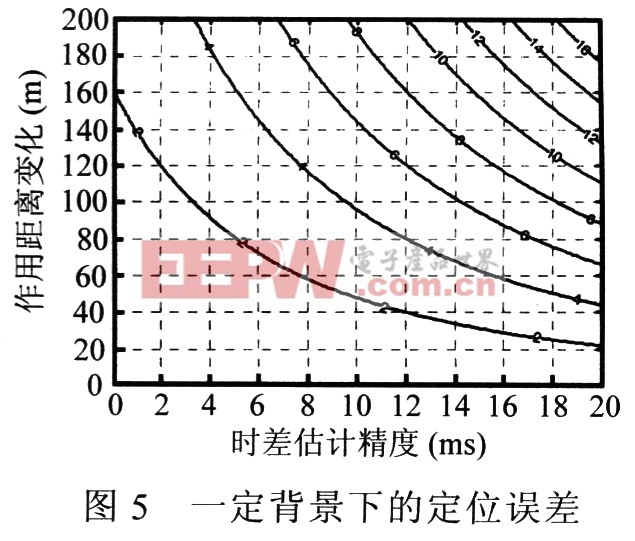
为验证定位性能,分别进行了一系列实验,限于篇幅原因,这里只对其中的一种状况进行说明:设声速c=340.29m/s,俯仰角θ=45°,方位角ψ=30°。在不同的时差估计精度下,当目标真实距离r变化时,对目标的定位精度误差如图5所示。实验结果表明这种定位方法与接收阵元间距、目标真实距离和时差估计精度等都有关系,这与第3部分的分析是一致的,具有一定的指导意义。
5 结束语
本文通过建立的接收模型和定位算法,能够通过对接收的舰船辐射噪声对舰船目标进行定位,在一定程度上可提高水下探测能力。对于不同的舰型,由于舰船噪声的音质节拍、音色及其频谱分布、信号过零点分布等不同,通常可根据这些特征,同时通过本文的盲分离算法处理结果,还可对目标类型进行识别。
- 利用红外线传感器实现接近感应应用(03-11)
- 电力变压器局部放电检测方法(09-10)
- 电源模块的应用设计和品质同样重要(02-09)
- 开关电源设计中如何减小EMI(05-05)
- 柴油发电机机组噪声控制(06-02)
- LED灯具光辐射安全相关标准(11-29)