小型仿人机器人的设计及步态规划
时间:09-23
来源:互联网
点击:
3.2 根据周期比例利用通用软件规划步态
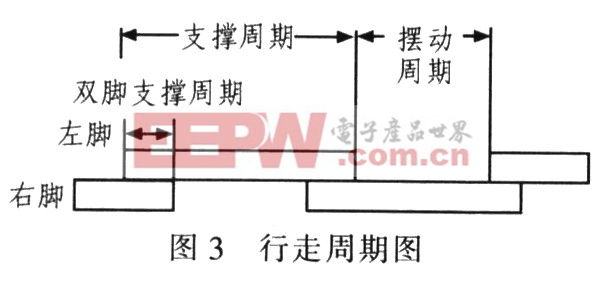
由图3可知,在一个完整的步态周期里包括2个双支撑和2个单支撑时间,设置双支撑占周期的20%,单支撑占周期的80%。对于单腿来说,整个周期里只有一个摆动周期,占周期的40%,支撑周期由一个单支撑和两个双支撑组成。占周期的60%。两条腿的髋关节角度必须满足式(1),才能保持行走时身体平衡。

式中,r为髋关节的相关系数,n为自由度,xi和yi分别是人类和机器人在第i次运动的髋关节角度,x和y分别是人类和机器人在一个周期内髋关节运动角度的平均值。根据式(1)利用目前通用的机器人行为编辑软件进行步态规划,规划结果如图4所示。

根据图4所示的步态规划与仿真图对所设计的机器人进行行走试验。试验结果表明,机器人在行走之前要有立正的准备姿势,使其重心与身体所在平面与地面垂直,通过调整膝关节角度实现机器人的稳定行走,证明了该算法可行。
4 结论
设计了一款结构紧凑、外形美观的小型双足机器人本体,机器人共18个自由度,每条腿6个,每条臂3个,可用作科学研究平台,也可用于机器人比赛。使用行为编辑软件步态规划所设计的机器人,所规划的步态模式具有轨迹可达性和运动可控性,反映一种连续稳定的自然行走模式。仿人模式的步态规划方法从模仿人的角度很好反映拟人体生物机械的高效步行机理。采用模糊控制和专家控制理论,以步态稳定状态为输入,非时间参考量轨迹的修正量为输出,涮节机器人的瞬时步行速度和双脚着地的周期比例,在线实时修正步态,机器人可在不改变空间运动路径的情况下实现动态稳定步行。
仿人机器人 相关文章:
- 12位串行A/D转换器MAX187的应用(10-06)
- AGC中频放大器设计(下)(10-07)
- 低功耗、3V工作电压、精度0.05% 的A/D变换器(10-09)
- PIC16C5X单片机睡眠状态的键唤醒方法(11-16)
- 用简化方法对高可用性系统中的电源进行数字化管理(10-02)
- 利用GM6801实现智能快速充电器设计(11-20)