瞄准器的眼跟踪算法研究
视线跟踪是图像实时处理的重要领域,广泛应用于军事领域的预警、火控、制导。视线跟踪又称眼睛瞄准系统或视觉跟踪系统,它用眼睛注视作为输入,并配上相应的硬件设备来表达思想及控制周围环境。另外还有“眼动鼠标”通过移动眼球控制电脑屏幕鼠标的运动,并且能利用眼睛的注视打开或关闭窗口程序,实验表明用视线跟踪控制要比鼠标迅速。
头盔瞄准器能够在尽可能大的范围内观察瞄准目标,而无需在发动攻击前才使飞机对准目标。从理论上讲,头盔瞄准器几乎具有全向视场,这是其他任何一种探测器都无法比拟的,而在实际应用中,头盔瞄准器的观察范围是由驾驶员头部转动所达到范围和头盔位置传感器跟踪测量范围共同决定,因此,头盔跟踪受跟踪范围和响应速度限制,而视线跟踪正好能扩大该范围。另外,随导弹离轴角的增加,头盔瞄准器观察目标和瞄准目标的范围要求也再增加,且要求在各种机动状态都能使用,眼跟踪和头跟踪正好解决了这个矛盾。
2 视线跟踪原理
以正视下的视线方向作为基准,改变视线方向,即眼球发生一定角度转动时,瞳孔中心位置同步移动,因此实时获取瞳孔中心位置坐标即可实现视线跟踪。
图1给出视线跟踪原理图。以眼底为坐标原点O,S为瞳孔中心位置,s’为S在YOZ面的投影,(M,N)为S’在YOZ面上二维坐标,CCD摄像机在X轴方向上。设定正视方向(即头盔跟踪法线方向)为X轴,头盔左右方向为Z轴,头盔上下方向为Y轴。根据瞳孔中心在ZOY面上的投影坐标及人眼球半径(约10 mm),得到俯仰角α(∠SON’)、方位角β(∠M’ON’)的值,这样就可确定眼跟踪视线方位。

3 跟踪算法实现
3.1 阈值选取
从内存读取红外源图像,图2(a)中,瞳孔与眼睛其他部分相比要暗得多,采用简单的二值化法分离瞳孔,提取瞳孔边缘。具体做法:先计算出整个眼睛图像的灰度直方图,第一个峰值对应的是瞳孔区域灰度值,如图2(b)中箭头所示。选择在第一个峰值的右侧相隔2至5个灰度值处提取瞳孔的二值化阈值,即灰度值为78,但这样会导致眼睫毛部分保留大量信息。图2(c)是采用阈值63二值化后的结果,可以看出,瞳孔被成功分离出来,虽然保留小部分睫毛,但不影响后续分析。

3.2 Sobel算子检测边缘
图像的边缘是图像最基本特征。所谓边缘就是指那些周围灰度有跳跃变化的像素集合。边缘广泛存在于物体与背景、物体与物体、基元与基元之间。Sobel算子是一种一阶微分算子,在边缘检测中应用广泛。Sobel算子有两个,其中, 是检测水平边缘的,而
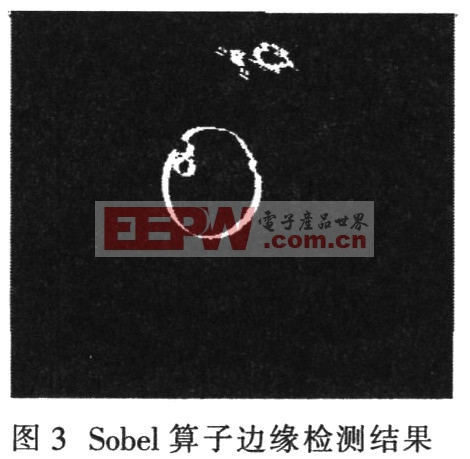
是检测水平边缘的,而 是检测垂直边缘的。在图2(c)中,瞳孔上的像素与其周围像素有明显阶跃变化。所以可利用该特性作为检测瞳孔边缘依据。利用Sobel算子检测瞳孔边缘结果,如图3所示。
是检测垂直边缘的。在图2(c)中,瞳孔上的像素与其周围像素有明显阶跃变化。所以可利用该特性作为检测瞳孔边缘依据。利用Sobel算子检测瞳孔边缘结果,如图3所示。
3.3 Hough圆检测算法
Hough变换是在图像处理中从图像中识别几何形状的基本方法。Hough变换的基本原理利用点与线的对偶性,将原始图像空间给定的曲线通过曲线表达形式变为参数空间的一点。这样就把原始图像中给定曲线的检测问题转化为寻找参数空间中的峰值问题,即把检测整体特性转化为检测局部特性,比如直线、椭圆、圆、弧线等。
Hough变换的编程思想:以已知量r、△r分别为半径、圆环的宽度,图像像素值为255、坐标为(xo,yo)的点为圆心,建立一个圆模板;将符合(a-x0)2+(b―y0)2一r2△r2的所有点(a,b)的坐标计入模板数组,然后将圆心移动至下一个符合像素值为255的点(x1,y1),同时将上述圆模板按照同圆心的行列变换移动,再次将符合(a-x1)2+(b-y1)2一r2△r2的所有点(a,b)的坐标计入模板数组。依此类推,检测完图像中所有符合要求的圆心,统计计入模板数组次数最多的坐标,那么该坐标就为所求参数坐标(a,b),即为固定半径下的圆心坐标。
3.4 瞳孔中心坐标确定
根据半径取值范围,进行多次Hough变换检测圆心,得到一个圆心集合,该集合中选取其对应频率最大的目标,即为真正的瞳孔中心。
3.5 眼球移动角度
图1所示的S’坐标即为瞳孔中心坐标,其投影SN’=S’N,S’M=ON=M’N’可得:

从而求得α,β∈(0~π/2),再根据瞳孔中心与正视时瞳孔中心位置,可得俯仰角和方位角。
3.6 算法实现
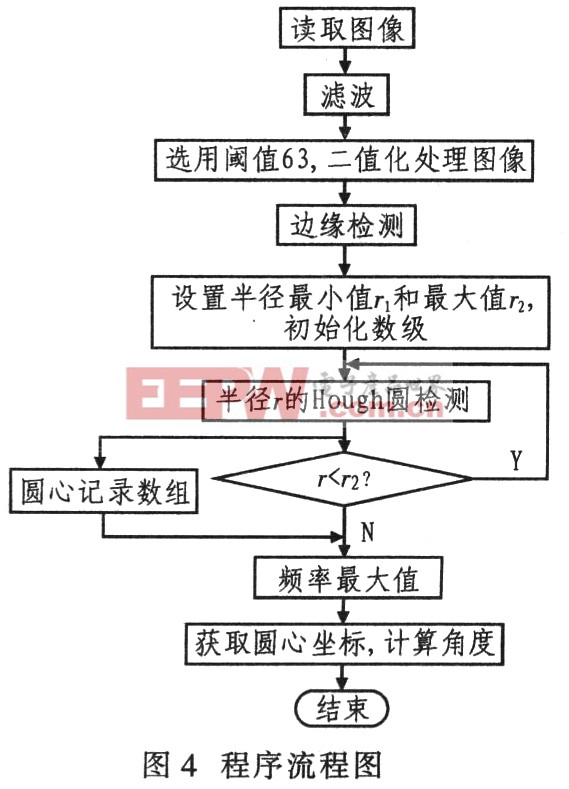
图像处理算法程序采用Visttal C++6.0,最后将图像处理程序封装在一个COM组件中,从而完成后台图像处理,并将所得的数据通过接口传递给前台界面,实现整个软件的系统测试。其程序流程如图4所示。
4 结语
目前现有的头盔瞄准系统,对目标瞄准线方向的测量都是对驾驶员头部位置空间的测量,但采用头盔测量方式的头盔瞄准系统,空中格斗时在高过载下,飞行员有时不可能转动头部,却可以用其眼睛一直跟踪,这就是眼跟踪的优势。研究表明,头盔跟踪期间,眼球运动超过头部运动,在多目标搜索的情况下,眼位置和头部位置保持一定角偏离,眼跟踪具有巨大的实际应用价值。眼跟踪和头跟踪的拟合使用,使瞄准更迅速,更精确,更自由。因此,该技术将大大提高空军的战斗力和反应速度。
跟踪算法 相关文章:
- 12位串行A/D转换器MAX187的应用(10-06)
- AGC中频放大器设计(下)(10-07)
- 低功耗、3V工作电压、精度0.05% 的A/D变换器(10-09)
- PIC16C5X单片机睡眠状态的键唤醒方法(11-16)
- 用简化方法对高可用性系统中的电源进行数字化管理(10-02)
- 利用GM6801实现智能快速充电器设计(11-20)