无人驾驶车辆终端控制的研究
无人驾驶汽车是一种智能汽车,也可以称之为轮式移动机器人,主要依靠车内的以计算机系统为主的智能驾驶仪来实现无人驾驶。无人驾驶汽车集自动控制、体系结构、人工智能、视觉计算等众多技术于一体,是计算机科学、模式识别和智能控制技术高度发展的产物,也是衡量一个国家科研实力和工业水平的一个重要标志,在国防和国民经济领域具有广阔的应用前景。
从20世纪70年代开始,美国、英国、德国等发达国家开始进行无人驾驶汽车的研究,目前在可行性和实用化方面都取得了突破性的进展。我国从20世纪80年代开始进行无人驾驶汽车的研究,国防科技大学在1992年成功研制出我国第一辆真正意义上的无人驾驶汽车。
2005年,首辆城市无人驾驶汽车在上海交通大学研制成功,该车有望于两年之内率先在上海世纪公园进行示范运营,并在2010年世博会上一展身手。到时游客只需在公园的入口处按下一个按钮,一辆没有司机的四座敞篷汽车就会从远处开过来缓缓停下,然后搭载着乘客前往他们想去的景点。
1 系统设计
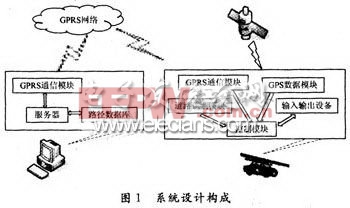
本系统主要由监控中心和无人驾驶车辆终端构成,如图1所示,而无人驾驶车辆终端又包含GPS,GIS,GPRS等部分:
(1)GPS(Global Positioning System,全球定位系统)是利用24颗人造卫星组成的卫星网,可以向地球不断发射定位及时间信号。地球上的任何一个GPS接收机,只要接收到4颗以上的卫星信号,经过计算处理后就可报出GPS接收机的位置(经度、纬度、高度)、时间和运动状态(速度、航向)。本系统采用GPS是为了使车辆在行驶过程中能够准确显示自己的位置。
GPS导航系统的基本原理是测量出已知位置的卫星到用户接收机之间的距离,然后综合多颗卫星的数据就可知道接收机的具体位置。要达到这一目的,卫星的位置可以根据星载时钟所记录的时间在卫星星历中查出。而用户到卫星的距离则通过纪录卫星信号传播到用户所经历的时间,再将其乘以光速得到(由于大气层电离层的干扰,这一距离并不是用户与卫星之间的真实距离,而是伪距(PR):当GPS卫星正常工作时,会不断地用1和0二进制码元组成的伪随机码(简称伪码)发射导航电文。GPS系统使用的伪码一共有两种,分别是民用的C/A码和军用的P(Y)码。C/A码频率1.023MHz,重复周期一毫秒,码间距1微秒,相当于300m;P码频率10.23MHz,重复周期266.4天,码间距0.1微秒,相当于30m。而Y码是在P码的基础上形成的,保密性能更佳。导航电文包括卫星星历、工作状况、时钟改正、电离层时延修正、大气折射修正等信息。
(2)GIS(Geography Information System,地理信息系统)GIS是以测绘测量为基础,以数据库作为数据储存和使用的数据源,以计算机编程为平台的全球空间分析即时技术。这是GIS的本质,也是核心,是在计算机硬件、软件系统支持下,对整个或部分地球表层空间的有关地理分布数据进行采集、存储、管理、运算、分析和可视化表达的信息处理和管理系统。在本系统中,他与GPS模块相结合,以地理空间数据为基础,在计算机系统中提供动态的电子地图,可以实时将交通信息通过GIS界面友好地显示给用户。
(3)GPRS,通用分组无线服务技术(General Packet Radio Service)的简称,它是GSM移动电话用户可用的一种移动数据业务。GPRS可说是GSM的延续。GPRS和以往连续在频道传输的方式不同,是以封包(Packet)式来传输,因此使用者所负担的费用是以其传输资料单位计算,并非使用其整个频道,理论上较为便宜。GPRS的传输速率可提升至56甚至114Kbps,是在GSM((Global System)全球移动通信系统的网络基础上叠加的一个专业的高速数据通信网络,共用GSM频率(900/1 800 MHz)。共享GSM网络绝大部分基础设施。可以接人基于TCP/IP的外部网络,具备了Internet所能提供的一切功能。本系统采用GPRS作为车载终端与监控端无线通信桥梁,主要是考虑到他有资源利用率高、传输速率高、接人时间短、网络覆盖面广等几个优势。
(4)射频识别读卡器。射频识别技术又称电子标签、无线射频识别,是一种通信技术,可通过无线电讯号识别特定目标并读写相关数据,而无需识别系统与特定目标之间建立机械或光学接触,在交通系统一般用于高速公路站上不停车收费,车牌自动识别或者停车场定时收费等。这些系统是将标签放置在车载终端上,在地面上安装天线、射频模块和计算机,利用射频模块中读写器来进行一定范围内的射频识别。射频识别模块通过装有标的车辆接近传感器来判别是否有车辆通过。识别模块在一定区域内产生微波信号,当车辆进入该识别区域时,就能激活标签。标
- 无人驾驶车辆终端控制的研究原理方案(10-08)
- 12位串行A/D转换器MAX187的应用(10-06)
- AGC中频放大器设计(下)(10-07)
- 低功耗、3V工作电压、精度0.05% 的A/D变换器(10-09)
- PIC16C5X单片机睡眠状态的键唤醒方法(11-16)