旋转目标干涉逆合成孔径三维成像技术
 (9)
(9) (12)
(12) (13)
(13)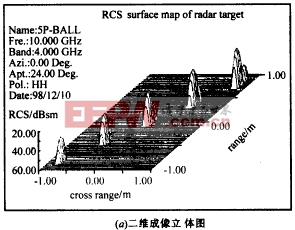
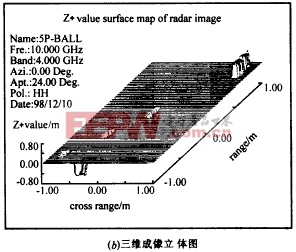
图4 五个球的组合目标三维成像模拟计算结果 表1 |
| 球半径(m)及RCS(dBm2) | 球心位置预设(m) | 球镜面位置预设(m) | 球镜面位置测量值(m) | |||||||||
| 序号 | 半径 | 预估RCS | 测量RCS | 横向 | 径向 | 竖向 | 横向 | 径向 | 竖向 | 横向 | 径向 | 竖向 |
| 1 | 0.05 | -21.05 | -21.3 | 0.80 | 0.80 | 0.5 | 0.80 | 0.75 | 0.5 | 0.80 | 0.76 | 0.51 |
| 2 | 0.04 | -22.22 | -23.0 | 0.40 | 0.40 | 0.0 | 0.40 | 0.36 | 0.0 | 0.40 | 0.36 | 0.00 |
| 3 | 0.03 | -25.41 | -26.0 | 0.00 | 0.00 | -0.2 | 0.00 | -0.03 | -0.2 | 0.00 | -0.02 | -0.20 |
| 4 | 0.02 | -30.93 | -29.3 | -0.40 | -0.40 | -0.4 | -0.40 | -0.42 | -0.4 | -0.40 | -0.42 | -0.40 |
| 5 | 0.01 | -33.43 | -34.4 | -0.80 | -0.80 | -0.6 | -0.80 | -0.81 | -0.6 | -0.80 | -0.80 | -0.62 |
| 五、微波暗室实验测试 根据前述三维成像测量技术,用飞机模型进行了实验测量.测试中心频率9.25GHz,带宽1.8GHz,水平极化,俯仰角差Δθ=-0.4°.测试结果见图5所示.如图中所示,P2为飞机的面天线;P1为压气机,距天线1.09m;P3、P5为进气口,相距0.15m,距天线0.435m;P4为座椅,距天线0.41m,比飞机轴心高约0.1m;P6为座舱前沿,距天线约0.29m;P7、P8为导弹架,相距0.61m,距天线0.86m,比飞机轴心低0.17m. |
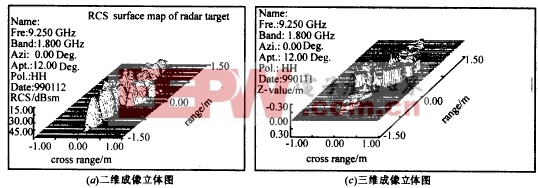
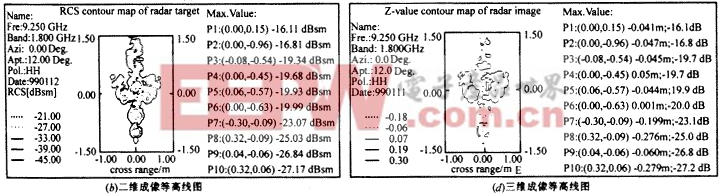
图5 某飞机缩比模型(头部方位)三维成像测量结果 在测量中,飞机轴心在竖向轴的位置约为-4cm.分析图5所示结果,飞机模型散射中心的相对位置关系吻合良好,误差在一个分辨单元之内.表明了旋转目标干涉逆合成孔径三维成像技术的可行性. 六、结 论 |
- 12位串行A/D转换器MAX187的应用(10-06)
- AGC中频放大器设计(下)(10-07)
- 低功耗、3V工作电压、精度0.05% 的A/D变换器(10-09)
- PIC16C5X单片机睡眠状态的键唤醒方法(11-16)
- 用简化方法对高可用性系统中的电源进行数字化管理(10-02)
- 利用GM6801实现智能快速充电器设计(11-20)