红外背景抑制与小目标分割检测
 为图像最大灰度值)的像素计数值为k.求出k的最大值,即为直方图中的最大计数峰值
为图像最大灰度值)的像素计数值为k.求出k的最大值,即为直方图中的最大计数峰值 且对应的灰度值记为fkm.因为m′>>m,且背景有相关性,则kmax必为背景像素的计数,如图9所示.对于小目标图像,利用成像传感器的灵敏度、分辨率、可成像距离和目标可能的实际大小等信息,可估计目标在图像中的面积大小,即所占像素数目m0.根据m0的近似估计值,对经过均匀值化处理后具有均值E的图像,取fkm作为门限,再循环地利用
且对应的灰度值记为fkm.因为m′>>m,且背景有相关性,则kmax必为背景像素的计数,如图9所示.对于小目标图像,利用成像传感器的灵敏度、分辨率、可成像距离和目标可能的实际大小等信息,可估计目标在图像中的面积大小,即所占像素数目m0.根据m0的近似估计值,对经过均匀值化处理后具有均值E的图像,取fkm作为门限,再循环地利用 (9)
(9)
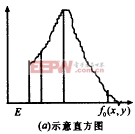
图9 均值化后图像的直方图 通过对空域、频域背景抑制滤波器和自适应门限背景抑制法的试验看出:对于小目标检测,空域和自适应门限法对内存要求低(只需分配两倍的图像大小内存);频域滤波器由于Fourier变换产生大量浮点型中间值不能释放,故占用内存大.在一般的IBM PC微机上会造成内存分配困难而难以实现.从运算速度看,空域滤波器只需做乘法和加法运算,运行最快,自适应门限法次之,频域法最慢,但空域滤波器处理效果最差,自适应门限法和频域滤波器处理效果好.又由于自适应门限对不同的图像可进行自适应调整,因此它与频域滤波器的通用性都好. 四、小目标检测 |
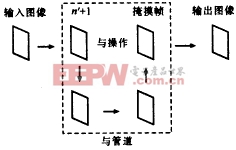
图10 流水线管道结构 每次管道更新后,在管道中移动一个窗口序列,窗口尺寸为l×m.当窗口移到有目标的位置时,由于目标出现的连续性,必然有较多的可疑像素聚集于窗口内,窗内像素的累加值会大于一个门限.如果没有目标,由于噪声的随机分布性,窗内像素的累加值就较小.从而我们可以检测出流水线中间的一帧是否存在目标并确定目标的位置. |
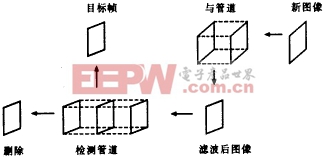
图11 目标检测流水线结构 1.对于先进入“与”管道的第n′帧二值图像进行数学形态学的膨胀运算,得到一个掩膜帧,使原二值图像为“1”的像素的小邻域都为“1”; |
- 基于红外遥控的数字调节开关电源设计与实现(10-24)
- 基于单片机技术的室内报警器的设计(02-16)
- 毫米波雷达前端系统设计(05-03)
- 一种高性能红外信号检测开关的设计与实现(05-27)
- 可控硅在红外遥控开关中的应用及工作原理(01-07)
- 利用红外线传感器实现接近感应应用(03-11)