晶体生长控制中的高精度控温系统
关键词:晶体生长;控温;信号调理
High Precision Temperature Control System in the Crystal Growth Control
YANG Qi, YANG Xiaoling
(Physics and Information Engineering College, Fuzhou University,
Fuzh ou 350002, China)
Keywords: crystal growth; thermo?control; signal processing
1系统硬件组成
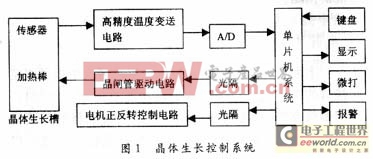
晶体生长控温系统如图1所示,高精度温度?变送器把检测到的微弱温差信号放大后经A/D转 换 ,由单片机系统进行数据采集和分析处理,一方面由LED显示现场采集温度值,另一方面把 该采集信号与键盘设置的温度值进行比较,提取温差量及温差变化量,作为智能控制的输入 参数。输出量控制晶闸管驱动电路,进一步控制加热棒的功率,达到控温目的。由于晶体生 长是在旋转运动下进行的,因此,整个载晶装置由一可逆电机控制其旋转过程。此外系统还 设计了微打接口及温度越限声光报警电路。
1.1高精度温度变送器
系统选用Pt100作为温度传感器。它的温度系数α=0.00385/℃,对于0.001℃ 的微小温差变化,Pt100的电阻值变化约为0.385mΩ,如此小的电阻变化量经电桥转 换后,电信号最大也只能达到0.5~1μV,因此处理微伏级弱信号的接口调理方法, 包括高精度不平衡直流电桥,低截频模拟滤波器,低噪声、低漂移、高灵敏度直流放大器及 接地体等环节的设计。
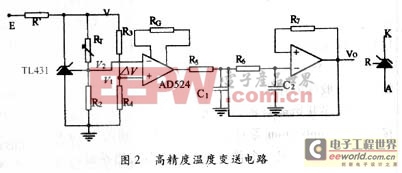
由图2电路可知:

 ?
?
当电桥平衡时有:R1R4=R2R3,RT=R1+ΔR 。代入上式并整理得:
 ?
?
对于具体温度测控系统,R2、R3、R4均为已知,VREF 为TL431的内部基准电压,是一恒值,因此电桥的输出电压ΔV与ΔR成线性关系,即电桥输出实现线性化。电阻R2、R3、R4均选温度系数小且同方向变化的线绕精密电阻,这样电桥输出信号达到高稳定度目的。
选择AD524作为温度变送器的放大电路,其增益可由外接电阻RG调整,RG的温度效应将 引起AD524放大倍数漂移或精密度等级下降,在高精度控温系统中,必须对增益电阻的温度 效应进行补偿,具体设计方法见文献[2]。
AD524放大的输出信号经其后接的二阶低通滤波器滤除电源干扰,RC滤波器的通带宽度设计 为1.4Hz,它适用于缓慢变化温度信号的带通要求,而对于高频干扰信号,低通 滤波 器具有良好的抗干扰能力。此外,输入信号采用双绞屏蔽线连接,以降低外界电磁干扰,放 大器的输入端采用紧密的对称布局,降低接点热偶效应的影响,提高系统的稳定性。
1.2单片机系统及其接口
温度变送电路的输出信号,经16位A/D转换器AD976转换和8031构成的智能控制系统分析处理 后,由LED显示现场温度值,同时输出信号控制晶闸管电路工作情况,从而控制槽中加热棒 的工作,达到控温的目的。晶闸管采用过零触发方式,输出功率采用PWM脉宽调节,避免负 载电流产生瞬态浪涌过程,减少射频干扰及延长晶闸管的使用寿命。
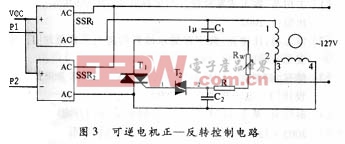
为使晶体生长均匀,要求载晶装置处于旋转运动中,即要求其按正转—停—反转—停—正转 规律不断运行,这一过程由图3的可逆小电机及其控制电路实现,系统要求电机转速较慢, 扭矩有较大的动力,因此选用10瓦ND-30型可逆电机,其中C1为电机起动电容,T1、T 2、R、C2、RW组成双向晶闸管电机调速电路,当8031使P1端输出低电平、P2端输出高 电平时,固态继电器SSR1闭合,电机正转;当P1端输出高电平、P2端输出低电平时,SSR2闭 合,电机反转,其转速通过调节R?W控制双向晶闸管T?1的导通角来实现;当P1端及P2端均 输出高电平时,可逆电机停止转动。?
系统的软件包括两大部分:键盘管理系统和智能控制器。键盘管理系统提供的功能包括数据 设定、现场温度显示、时间显示、重新启动、停止控制、数据打印等,提供一个人机交互的 简单界面。
智能控制系统实现现场数据采集,智能控制算法以及受控过程的输出控制等,其原理框图如 图4所示。人工晶体生长环境存在受控环境变化大,工艺曲线不确实,真实信号难采集等特 点,因此采用二级智能控制策略:一级为主控制级,也称内环控制,一级为参数校正控制级 ,也称外环控制。综合数据库为内环和外环所共享,存贮了受控对象的先验知识、所要求的 品质指标、控制参数的先验值及系统运行过程的有关动态值等,它为内环和外环提供有效的 控制数据。?
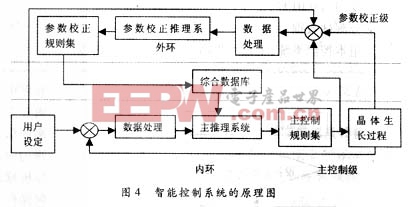
内环控制过程同时受到外环监测,当环境相对稳定,主控制级控制效果较好时,参数校正级 就无需
- 串联型晶体振荡电路(01-24)
- 石英晶体正弦波振荡电路(01-24)
- 利用单晶体管构建智能的电池充电器电路(03-05)
- 采用双极型晶体管的直流250mV转换器(07-28)
- 什么是晶体二极管?(07-21)
- OLED的结构原理及优缺点(10-01)