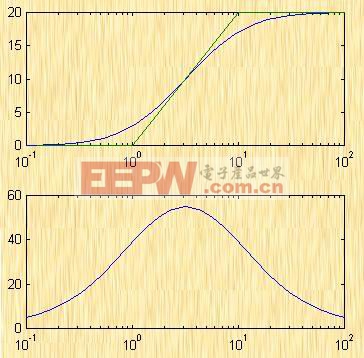
根据式(6—7)、(6—10),可令 ,利用如下Matkab语句作出它的伯德图,如图6—6所示。
alpha=0.1; T=1;
Gc=tf([T,1],[alpha*T,1]);
[x0,y0,w]=Bode(Gc);[x,y]=bode_asymp(Gc,w);
subplot(211),semilogx(w,20*log10(x0(:)),x,y)
subplot(212),semilogx(w,y0(:))
由式(6—7)可知,由于α1,因而当 0ω∞时,校正网络的相位总是正值。这明输出信号在相位上总超前于输入信号一个角度,因而称该校正网络为超前校正。同时,由于当ω→0,L(ω)→0 ;当ω→+∞时,L(ω)→最大值20lg(1/α) ,所以超前校正装置又是一个高通滤波器。
比较图6-4和图6-5可见,ωm是Gc(s)零点和极点的几何平均值。理论上,最大相位超前角φm不大于90°,但实际上,一般超前校正网络的最大相位超前角φm不大于65° 。如果要得到大于65°的相位超前角,可用两个超前校正网络相串联来实现,并在串联的两个网络之间加一隔离放大器,以消除它们之间的负载效应。
6.2.2 迟后校正
与超前校正相反,如果一个控制系统具有良好的动态性能,但其静态性能指标较差(如静态误差较大)时,则一般可采用迟后校正装置,使系统的开环增益有较大幅度的增加,而同时又可使校正后的系统动态指标保持原系统的良好状态。
(一) 迟后校正装置
无源的迟后校正装置可由图6—7(a)构成。由图可得到该校正装置的传递函数
| 式中, |  | , |
有源的迟后校正装置由图6-7(b)构成。其传递函数为: 式中, Ti=R2C,k=R2/R1,同样等式右边的负号可通过串联一反相器加以抵消,因而(6-12)可改写为比例积分控制器PI的形式: (二)迟后校正装置的极点及频率特性
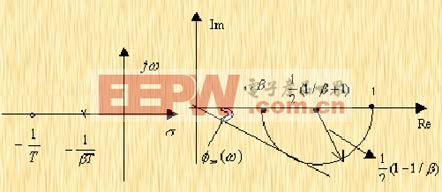
由式(6-11)可分别得到该迟后校正装置的零、极点分布图(6—8)、极坐标图(6—9)、伯德图(6—10)
| 图中, |  | , |
比较超前校正装置和迟后校正装置可以发现,迟后校正装置具有如下特点:
1)输出相位总滞后于输入相位,这是校正中必须要避免的;
2)它是一个低通滤波器,具有高频率衰减的作用;
3)利用它的高频衰减作用(当 ),使校正后系统剪切频率 前移,从而达到增大相位裕量的目的。
6.2.3 迟后-超前校正
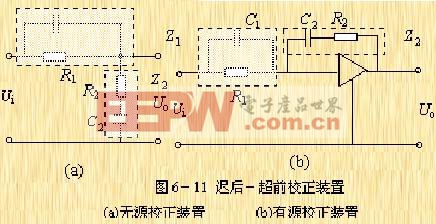
(一) 迟后-超前校正装置
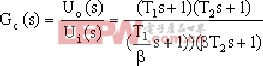
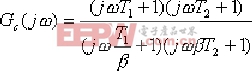
上图构成了迟后-超前的无源和有源装置,无源校正装置的传递函数为:
上式中,令:T1=R1C1,T2=R2C2,T1/β+βT2=R1C1+R2C2+R1C2,β>1,且令 T2>T1。同时,上式也可改写成如下形式:
其中前半部分起超前作用,后半部分起迟后作用。
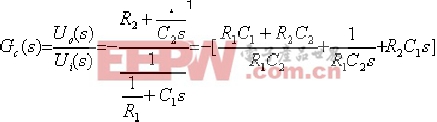
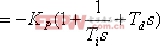
同理,有源校正装置的传递函数为:
显然,有源迟后-超前校正装置的传递函数同时是一个典型的PID控制器,式中:KP为比例系数,Ti 积分时间常数,Td为微分时间常数。
(二)迟后-超前校正装置的极点及频率特性
根据迟后-超前装置的传递函数,可得到其频率特性:
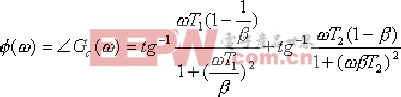
其对应的幅频特性和相频特性分别为:
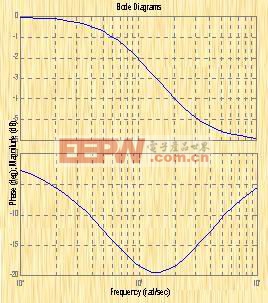
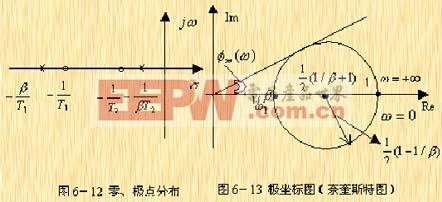
根据上面二式可分别画出其零、极点分布图、极坐标图、伯德图。从图中看出,因 T2>T1,迟后部分的零极点更靠近原点,使系统的静态性能得到改善。
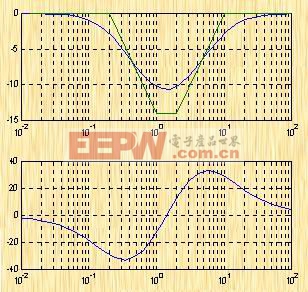
从图6-13和6-14可以看出当ω从0→ω1 变化时,迟后-超前校正装置起超前作用,而当ω从ω1→∞ 变化时,校正装置起迟后作用。由下列Matlab语句可得到其伯德图:
alpha=[0.1:0.1:0.5]; T1=1;T2=5;
Gc=tf([T1,1],[alpha*T1,1])*tf([alpha*T2,i],[T2,1]);
[x0,y0,w]=bode(Gc);[x,y]=bode_asymp(Gc,w);
subplot(211),semilogx(w,20*log10(x0(:)),x,y)
subplot(212),semilogx(w,y0(:))
同时,容易计算相角为零的频率ω1 为:
可见,迟后-超前校正装置是超前装置和迟后装置的组合。