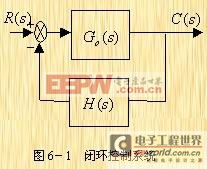
前面介绍了校正装置的结构形式。为了满足不同系统的控制性能要求,串联校正装置可设计成相位超前校正、相位迟后校正和和相位迟后-超前校正形式。本节首先介绍此三种装置的无源和有源网络结构,然后在此基础上介绍频率校正原理和MATLAB的设计方法。而关于串联校正装置的根轨迹方法则在下一节介绍。
6.2.1 超前校正
如前所述,为满足控制系统的静态性能要求,最直接的方法是增大控制系统的开环增益,但当增益增大到一定数值时,系统有可能变为不稳定,或即使能稳定,其动态性能一般也不会理想。为此,需在系统的前向通道中加一超前校正装置,以实现在开环增益不变的前提下,系统的动态性能亦能满足设计的要求。本节先讨论超前校正网络的特性,然后分别介绍基于频率响应法的超前校正装置的设计过程。 (一)超前校正装置
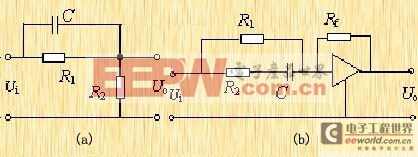
图6-3 超前校正装置
(a) 无源校正装置 (b)有源校正装置 |
图6-3分别为无源和有源超前校正网络。对于无源校正装置(a),忽略该网络的输入阻抗和输出阻抗效应,则其传递函数为:
| 式中, |  | , |
上式另一常见形式可写作: | 式中, |  | , |
对于有源校正装置(b),其对应的传递函数为:
| 式中, |  。 。 |
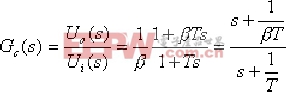
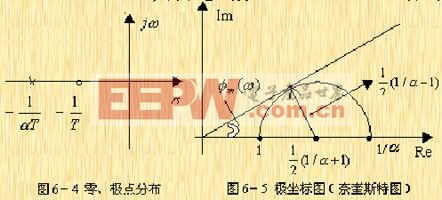
负号是因为采用了负反馈的运算放大器,再串联一只反相运算放大器即可消除负号。 在式(6-3)中,令R1C=T1,R2C=T2 ,则(6-3)可写成如下形式: 上式即为实际的比例微分控制器(PD)的传递函数的表达式。 超前校正装置的零、极点分布如图6-4所示,由于β>1 ,故 Gc(s)的零点总在其极点的右侧。由式(6-1)和式(6-2)可知,在采用超前校正网络时,系统的开环增益会有1/β (或k )倍的衰减。对此,用放大倍数β 或(1/k)的附加放大器予以补偿。经补偿后,令α=1/β ,其传递函数 , ,
频率特性为: 与式(6-5)对应的幅频特性的表达式分别为: 其相应的极坐标如图6-5。由图可见,超前校正装置的极坐标是一个位于第一象限的半圆,圆心坐标 [(1+1/α)/2,j0],半径为 (1/α-1)/2,从坐标原点到半圆作切线,它与正实轴的夹角即为该校正装置的最大超前角φm ,且有: 此最大超前角对应的频率可由式(6-7)得到。令dφ(ω)/dω=0,则有:
对式(6-6)的幅频特性取对数坐标,有:
根据式(6—7)、 |