滞后不确定系统的无辨识自适应智能控制方法

(3)逆模糊化。采用加权平均法进行反模糊化,模糊预测控制的输出由下式确定
3 仿真研究
含有纯滞后的非线性被控对象为
单神经元PSD控制器参数取L=0.06,c=0.03,kv(0)=0.15,Tv(0)=55,w(0)=[0.1. 0.5.0.35],η(0)=[0.045 0.05 0.1];模糊预测器的量化因子及比例因子取ke=7,kec=2,ku=0.01,分别采用单神经元PSD控制器及本文的无辨识自适应智能控制器进行仿真,仿真结果如图2所示。
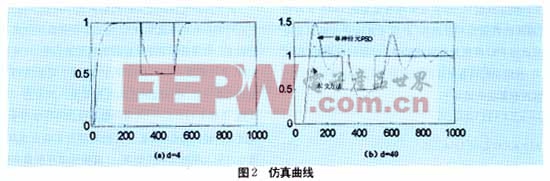
其中(a)为滞后步数为4时的跟踪结果,两条曲线基本重合,可见两种方法性能基本相同;(b)为在保持原控制器参数不变,滞后步数增大到40时的跟踪结果。此时,单神经元PSD控制器产生较大超调,且不能在规定步数内达到稳定。而本文方法则可以取得较满意的控制效果,具有较强的自适应性。
4 结论
无辨识自适应智能控制方法将神经网络的自学习、自调整特性和模糊控制良好的动态特性、鲁棒性,以及在处理具有不确定性控制问题上的独到优势结合在一起,以模糊预测来修正单神经元自适应PSD控制律,从而在不增加对过程模型要求的基础上,实现了对大滞后不确定过程的控制。该控制算法简单,适合时实控制,且适应性、鲁棒性强,仿真研究表明该控制方法用于滞后不确定系统的控制取得良好的控制性能。
参考文献:
[1]韩江洪,鲁照权,陆阳.滞后不确定系统控制[J].合肥工业大学学报,2000,23(1):16-20
[2]Marsik J,Strejc V.Application of identification_free algorithms for adaptive control[J].Automatica,1989,25(2):273-277
[3]赵锡龄,焦云婷.单神经元自适应控制PSD在再热汽温控制中的应用[J].中国机电工程学报,2001,21(2):94-96
[4]杨智,刘暾东,赵克中.基于内模结构的模糊控制器[J].甘肃科学学报,2000,12(2):16-19
模拟电路 模拟芯片 德州仪器 放大器 ADI 模拟电子 相关文章:
- 12位串行A/D转换器MAX187的应用(10-06)
- AGC中频放大器设计(下)(10-07)
- 低功耗、3V工作电压、精度0.05% 的A/D变换器(10-09)
- PIC16C5X单片机睡眠状态的键唤醒方法(11-16)
- 用简化方法对高可用性系统中的电源进行数字化管理(10-02)
- 利用GM6801实现智能快速充电器设计(11-20)