�ͺ�ȷ��ϵͳ���ޱ�ʶ����Ӧ���ܿ��Ʒ���
�ͺ�ȷ��ϵͳ���ޱ�ʶ����Ӧ���ܿ��Ʒ���
��Դ��д��ͺ�ȷ���ԵĹ�ҵ���̣����һ�������ʶ������Ӧ���ܿ��Ʒ������÷�������Ҫ�Թ��̽�����ѧģ�ͣ�ֻҪ�����̵�ʵ����������������ͨ��ģ��Ԥ���������������Ԫ����ӦPSD�����ɣ������Զ��ͺ�ȷ������ģ���ѵĹ�ҵ����ʵ������Ӧ���ơ������������ø÷��������ͺ�ȷ��ϵͳ���м�ʵ�á�³����ǿ���ص㡣
�ؼ������ͺ�ȷ��ϵͳ ����Ԫ PSD���� ģ��Ԥ�����
1 ����
���д��ͺ�IJ�ȷ��������ʯ�͡�������ұ��ȹ�ҵ�����й㷺���ڵ�һ�ิ�ӹ��̡����Ŀ�������һֱ�����ſ������ۺͿ��ƹ���ʵ�������⡣Ŀǰ���ͺ�ȷ������Ŀ�����Ҫ��������Ӧ���ơ�³�����ơ�Ԥ����Ƶ��ۣ�����Ȼ����Щ�������ǽ����ڹ���ģ��ȷ���Ļ����ϣ����ܶ���Щ����ȷ��ģ�ĸ��ӿ��ƹ��̽�����Ч�Ŀ��ơ�Marsik��Strejc�ۣ�����1983����ݿ��ƹ��̵ļ������Խ�������ָ�꣬����������ʶ������ӦPSD(��������͡���)�����㷨�����ַ��������ʶ����IJ�����ֻҪ������ʵ���������������Ϳ����γɱջ����ƣ����Ǹ÷������ܽ�����ͺ����⡣�Ը��㷨������Ԫ�������γɵĵ���Ԫ����ӦPSD�����ۣ���������ǰ�߾��и�ǿ����Ӧ�Ժ�³���ԣ����㷨������ʵʱ���ƣ���һ����Χ�ڶ��ͺ�ȷ��������ʵ�ֽϺõĿ��ơ�������Ԫ����ӦPSD�㷨��Ȼ���ù��̵�ǰ��ȥ����Ϣ��ȷ����ǰ�Ŀ��ƶ���������Ԥ�����δ����������仯���ƣ����ͺ�����������ʱ���������������Ȩֵ������Ӧ�������Դ��ͺ�ȷ�����̽�������Ŀ��ơ�
����������⣬��ģ��Ԥ����������ͺ�ȷ�����̵Ŀ����С�����ģ���������õĶ�̬���Ժ�³�����ۣ������Լ����ڴ������в�ȷ���Կ��������ϵĶ������ƣ���ģ��Ԥ�������Ԥ�����δ����������仯���ƣ���������Ӧ��Ԥ�����������ģ��Ԥ������������Ԫ����ӦPSD�����ɹ��������ʶ������Ӧ���ܿ���ϵͳ���������������ÿ��Ʒ������ͺ�ȷ��ϵͳ�������õĸ��ٵ������Ժͽ�ǿ������Ӧ������
2 �ޱ�ʶ����Ӧ���ܿ���ϵͳ���
���ڿ����ͺ�ȷ�����̵��ޱ�ʶ����Ӧ���ܿ���ϵͳ�ṹͼ��ͼ1��ʾ������ϵͳ����������ɣ�����Ԫ����ӦPSD����(���߿���ʾ)��ģ��Ԥ�����(�㻮�߿���ʾ)�����е���Ԫ����ӦPSD��������������������Ԫ������������Ӧ����ѧϰ������������Marsik��Strejc������ޱ�ʶ����ӦPSD�㷨����Ԫ������������ߵ�������ǿ�˶��ͺ�ȷ�����̵���Ӧ�Ժ�³���ԡ�ģ��Ԥ����������������ڲ����ӶԹ���ģ��Ҫ��Ļ����ϣ����ݹ��̵����������ϢԤ���������������������Ԫ����ӦPSD��������ʹ��������ǰ�������Ӷ�ʹ���������㷨�����ڴ��ͺ�ȷ�����̵Ŀ��ơ�
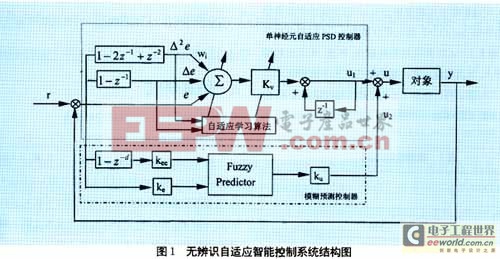
2.1 ����Ԫ����ӦPSD������
ͼ1����ԪȨֵwi��ѧϰ�����мල��Hebbѧϰ����Ϊ��֤�㷨�������Ժ�³���ԣ���ѧϰ�㷨���й淶����������������ӦPSD�����㷨������kv(t)�����Ե��������ɾ�����ѧϰ������֯��ǿ³���Ե����͵���Ԫ����Ӧ�УӣĿ����㷨��������㷨�������£�
ʽ��r(t)Ϊ�����źţ�u(t)Ϊ�����������y(t)Ϊ�����ʵ�������xi(t)(i=1,2,��,n)Ϊ��Ԫ������״̬��wi(t)Ϊ��Ӧ��xi(t)�ļ�Ȩϵ������iΪѧϰ�ٶȡ�����PSD���ƹ��ɿ��Եõ���������kv(t)�����ߵ�����ʽ���£�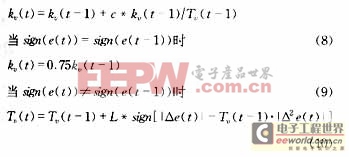
����0.025��c��0.05��0.005�ܣ̡�0.1
������Ԫ����Ӧ���УӣĿ����㷨������ϵ�������ߵ��������Ŀɵ�����ѡ��Χ�ϴ�����˿���ϵͳ��³���Ժ�����Ӧ���������ͺ�ȷ��ϵͳ�ķ���ʵ����������ͺ�����̫��ʱ��ͨ������kv(0)��Tv(0)�ij�ֵ����һ����Χ�ڿ��Ը���ϵͳ�Ķ�̬���ԣ�ȡ�ý�����Ŀ���Ч����������һ�������ͺ���������kv(t)��Tv(t)���Ե�����Ȩֵ����ѧϰҲ��������ϵͳ����ij����������������ͺ�ȷ��ϵͳ���п��ơ����ڴ�����ģ��Ԥ�����������ģ��Ԥ�����������������Ԫ����Ӧ���УӣĿ��������Ӷ��Դ��ͺ�ȷ��ϵͳ������Ч�Ŀ��ơ�
2.2 ģ��Ԥ�������
ģ��Ԥ���������ģ��Ԥ��Ĺ����Ǹ��ݹ���ʵ������ƽ�������������ƿ���ϵͳ�����ܲ�������Ԫ����ӦPSD�����ɡ�����������£�
(1)ģ������ģ��Ԥ��������������ǹ���ʵ�����������������ƫ��e(t)����ƫ����tʱ�̺�t-dʱ�̵ı仯��e(t)������ǿ��Ʋ�����u2(t)��e(t)�ͦ�e(t)����Ϊ
����dΪ���ͺ�ʱ�䡣ȡke��kec�ֱ�Ϊe(t)�ͦ�e(t)���������ӣ�kuΪԤ������ı������ӡ�E��EC��U2�ֱ���e(t)����e(t)��u2(t)�����Ա�����E��EC��ȡ�������Ա����ֱ�ΪN��S��P��U2ȡ�߸����Ա���ΪNB��NM��NS��ZR��PS��PM��PB������E��EC�����U2�����������ξ��ȷֲ���������������
(2)ģ�����ƹ���ģ��Ԥ����Ƶ�ģ������Ϊ
��if E(t) is A and EC(t) is B then U2(t) is C
����A��B��C�ֱ�Ϊe(t)����e(t)��u2(t)��ģ���������tʱ��e(t)��0��������������������С���ҹ�������б����������С�����Ƽ���e(t)��0����ô�����ƶ�t-dʱ�̹��̵�����̫С��Ӧ����t-dʱ�̿�������������෴������������������������ҹ�������б����������������Ƽ�e(t)��0�Ҧ�e(t)��0����ô�����ƶ�t-dʱ�̹��̵�����̫��Ӧ��Сt-dʱ�̿������������ͬ�����Թ����ģ��������������1��
ģ���· ģ��оƬ �������� �Ŵ��� ADI ģ����� ������£�
- 12λ����A/Dת����MAX187��Ӧ��(10-06)
- AGC��Ƶ�Ŵ������(��)(10-07)
- ���ġ�3V������ѹ������0.05% ��A/D�任��(10-09)
- PIC16C5X��Ƭ��˯��״̬�ļ����ѷ���(11-16)
- �ü����Ը߿�����ϵͳ�еĵ�Դ�������ֻ�����(10-02)
- ����GM6801ʵ�����ܿ��ٳ�������(11-20)