预测控制中的稳态优化策略
定义稳态优化目标以及优先级如表2
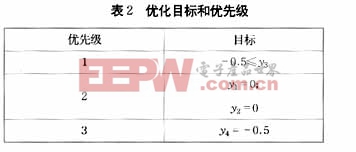
优化目标中-0.5<y3属于区间优化,y1=0,y2=0属于设定值优化,y4=0.5属于经济量的ESV。
硬约束为:-0.5≤y1≤0.5;-0.5≤ui≤0.5,i=1,2 ,3
这一优化问题的目标规划如下
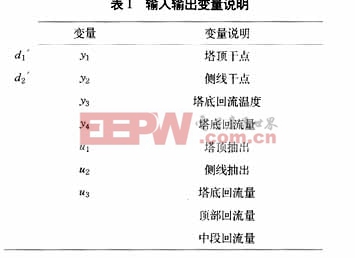
计算结果控制作用为ul=0.5,u2=-0.0529,u3=-0.104。利用控制作用可以得到输出的设定值yl=0、y2=0、y3=0.0076、y4=-0.104。也就是说预测控制中的设定值将从这几个数据中产生。这样的设定值是合理的,所以预测控制可以无偏的实现并且保证较快的回复时间。
为了验证目标规划算法,假设前3个高优先级满足那么这个问题可以用如下的线性规划表示
线性规划的结果是-0.104,这也说明了目标规划的正确性。如果有多余的自由度目标规划也会把第4优化级优化到目标值,但是现在由于没有多余的自由度,所以目标规划就只有使第4优化级尽量接近目标值。
例2
情况1,当ytgt=5,IRV=0,解上述目标规划可以得到动态控制的设定值为y=5;u2=0
情况2,当ytgt=10,IRV=0,解上述目标规划,由于ytgt=10的优先级高,所以首先满足它,然后尽量减少u2的负偏差,结果为ul=3,u2=2。可以得到动态控制的设定值为y=5;u2=2。所谓胖瘦系统的转变可以通过优化层变化控制层的设定值自然地得到体现。实际上由于没有自由度,此时的经济量为自然响应。
情况3,当ytgt=15,IRV=0,解上述目标规划,可以得到动态控制的设定值为y=12;u2=3。即使自由度用尽也不能够满足基本控制目标。
情况4,当8≤ytgt≤10,IRV=0,经计算设定值为y=8;u2=1。y=8是为了在满足区间的同时使经济目标尽量接近IRV。
4 结论
预测控制器的动态控制用于克服扰动保证最佳工作点和在最佳工作点变化后移动工作点,实现了控制器的调节特性和伺服特性。预测控制器的稳态优化则实时的根据扰动和工况的变化寻找最佳工作点,预测控制器中的稳态优化可以使预测控制器克服以前存在的缺点更平稳高效的运行。本文首先介绍了预测控制器的特点和以前所做的工作,最后给出了基于目标规划理论的稳态优化策略。这种策略克服了传统预测控制存在的不足,可在自由度不足时优先保证基本控制目标,在自由度多余时充分利用自由度提高效益,而且由于采用的线性规划理论所以计算量不大。
参考文献:
[1]肖明波,钱积新.预测控制中静态目标的实现[J].控制理论与应用,14(3):313-317,1997
[2]Chao-Ming,srikanth Voorakaranam,Babu Joseph.Analysis and Performance of the LP-MPC and QP-MPC Cascade Control System[C]. Proceedings of the ACC,Philadelphia,Pennsylvania.1998
[3]Grosdidier G.Froisy B.Hammann M.,The IDCOM-M controller.IFAC Modelsbased predictive process control[C],1988,31-36
[4]C,L.E.Swartz,An algorithm for hierarchical supervisory control[C].computers chem.eng.10(11):1173-1180(1995)
模拟电路 模拟芯片 德州仪器 放大器 ADI 模拟电子 相关文章:
- 12位串行A/D转换器MAX187的应用(10-06)
- AGC中频放大器设计(下)(10-07)
- 低功耗、3V工作电压、精度0.05% 的A/D变换器(10-09)
- PIC16C5X单片机睡眠状态的键唤醒方法(11-16)
- 用简化方法对高可用性系统中的电源进行数字化管理(10-02)
- 利用GM6801实现智能快速充电器设计(11-20)