Ԥ������е���̬�Ż�����
�ؼ��ʣ�Ԥ����� ��̬�Ż� Ŀ��滮
1 ����
Ԥ������㷨���˿��Դ���Լ���⣬����������Ա����һ���ŵ����ڣ���Ϊһ������������㷨��Ԥ������е�ϵͳ���벢���ǽ�����ijһ���ض���������������еı��ر�����һ����ϵ֮�С������Ϳ�����ϵͳ�������뱥�͡�ִ�л���ʧ���ԭ��������ɶȶ�ʧ���Կ���Ѱ����ѿ���Ч������֤װ�õ�ƽ�����У�����������ڶ�������ɶȣ������������Ҫ���ͬʱ���ݱ���������һ���ķ�Χ�仯������Ԥ����ƿ����ڸ��Ӿ��õ�״̬���С����Ǵ�ͳ�Ŀ��Ʋ��Բ��ܹ�ʵ�������Ҫ��
Ϊ�˷���Ԥ����Ƶ��ŵ㣬ʵ������Ҫ����Ҫ�����µIJ��ԡ��Ż�+���Ʋ��������бȽϳɹ��IJ���֮һ�����Ż�����ɿ��Ʋ���趨ֵ���㣬��һ��������������ȼ�����ȷ���ص����Ŀ�꣬Ȼ����һ�����Ŀ�꣬�������Դ��ڶ������ɶȣ����ڱ�֤ǰ�����Ŀ���ǰ���½��о����Ż���
�����ڶ���ǰ�����������з���������˻���Ŀ��滮���۵��Ż����ԣ������Ż����Ժʹ�ͳ���㷨���Ͽ��Ը�Ч�����شﵽ�����Ŀ�ġ�
2 ��ǰ�Ĺ���
��Rά���롢Sά�����ϵͳ��Ԥ������㷨������ͼ���δ��M��ʱ��(����ʱ��)�Ŀ��ƣ�ʹģ��Ԥ�������δ��P��ʱ��(�Ż�ʱ��)�ڴﵽ���ϻ���Ŀ�ꡣ����Ķ�̬�������(DMC)�����������£ۣ���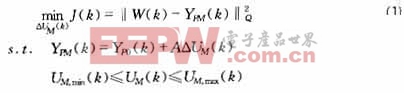
(������һЩ�����������类�ر��������ݱ�����Լ������) (2)
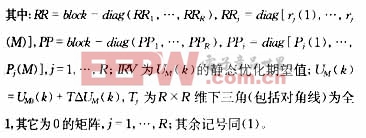
���У�W(k)Ϊ�ο��켣��(S��P)ά������YPM(k)Ϊ��UM��k)������ģ��Ԥ�������(S��P)ά������YP0(k)���Ԥ���ֵ��(S��P)ά������AΪ��̬�����ɽ�Ծ��Ӧϵ���ųɵ�(S��P)��(R��M)ά����Q=block-diag(Q1������Qs)��Qi=diag��qi(1),��,q��i(p)��,i=1,��,S��
Ԥ��������IJ��ݱ������ڱ��ر���ʱ�����ݱ������ܴ��ڶ�������ɶȡ�������ö������ɶȣ�Ԥ����ƿ����ڸ����õ�״̬�����С�Ϊ�����ö������ɶȣ���Ҫ�ڿ���Ŀ��������;���Ч����صı�������Щ������Ϊ���ñ��������Թ��Ϊ����������̬Ŀ�꣬���ÿ����������ӽ���������ֵ̬(Ideal Rest Value-IRV)��
����������˼·����ӳ��̬�Ż�Ҫ�������뵽����ָ��(1)�У��Ϳ��Եõ�һ�ֳ�Ϊ�ۺ�����ָ�귨��Ԥ����ƸĽ�������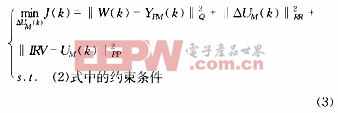
���ۺ�����ָ�귨Ҳ����ȱ�㣬�������£ۣ��ݣ���1)���ڴ�Ľ�Ծ�Ŷ�ʱ������Ŀ�꺯����������̫����ɿ������ñ����ƣ�ʹ�������óٻ��������Ӧƫ���ͻظ�ʱ�䳤����2)�����ۺ�ָ�귨�Ŀ���ϵͳһ������ϵͳ��������ģ��ʧ����Ŷ�ʱ���趨ֵyset����uset������ͬʱʵ�֡�������ʵ���У�ģ��ʧ����Ŷ��Ĵ��ڲ��ɱ��⣬�����������̬��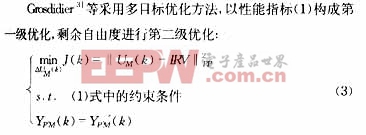
���е�ʽԼ���е�YP��M��(k)�Ǵ�δ��P��ʱ��Ԥ��ֵ��ѡ���ġ�
���ڲ����˷ֲ��Ż��ĺ����ṹ����Ŀ���Ż������˷����ۺ�Ŀ�귨��һЩ���㣬�������ַ��������ɶȼ��ٺ���θ������ȼ���ʵ�ֶ���Ҫ����Ŀ������ȿ���û���漰������Ҫ�����ڸĽ��㷨���ص������������á���ϵͳ���Ķ������ɶ��ϣ�û�й���ǡ���ϵͳ�����ɶȲ���ʱ�������
Swartz�ۣ�����ԡ���ϵͳ�����ɶȲ�������������˷ֲ�ල���Ʋ��ԣ��ڼල�����и������ȼ���ʵ�ֱ�������趨ֵ���Ż����㡣�趨ֵͨ���������ȼ�������Ż�����������ȡ�ã�����ÿһ�������ⶼ��һ�����ι滮����Ŀ�꺯��Ϊ������ʹ����趨ֵ�ӽ�����ֵ��������һ���Ż��������Լ����ʵ���ڱ�֤��һ���Ż�����Ŀ���ǰ���£��������ȼ��͵��Ż��������⡣���ַ������ŵ㣺ȷ������Ч�������÷ֲ���Ż�+���ƽṹ�����ַ�����ȱ����Ҫ���ڶ༶�Ķ��ι滮��������̫��������̬����ָ�겻��ֱ�ӷ����Ż������У������ڴ��ڶ������ɶȵ�����£�����Ŀ����Ż�����Ҫ����������
Swartz�ļල���Ʋ����м��������̬ʱ������趨ֵ��������ָ��Ҳ����̬�Ż����������ǽ�����������Ĺ����������һ���µ��Ż�+���Ƶ�����Ԥ������㷨��ͬʱʵ����̬�Ż��Ͷ�̬���ơ����Ż�����ʹ�ü�Ŀ��滮����������˰�����������趨ֵ����;���ָ���Ż�����̬�Ż��������ڶ�̬���Ʋ�����ȡ�ۺ�ָ�귨���ŵ㣬�����˶���̬����Ŀ��Ŀ��ƶ��ҿ˷����ۺ�ָ�귨��ȱ�㡣���ֲ������Թ滮���оֲ��Ż���Ԥ����ƽ��ж�̬���Ƶ��㷨������ʵ����ν����ϵͳ������ת���������ȱ�֤��������Ŀ���ǰ���£�ʵ�־���Ŀ���Ż���
�ܵ���������ǰ�Ĺ������п�ȡ֮�������ǿ��ǵ�������о����ԣ����ǽ��������˶����ɶ��µ���̬����ָ���Ż������ǽ������������ɶȲ���ʱ��������Ŀ������ȼ����ơ���Ƚ϶��ԣ���������ĸĽ����Ż�+���Ʋ��Կ���ʵ������ϵͳ������ת�䣬�����ڰ����ȼ���֤����Ŀ���ǰ���£���Ŀ������
3 ����Ŀ��滮���Ż�����
���ض����������̬ģ���������£�
���٣��ǣգ��� (4)
��GΪ��̬��������ǽ�Ծ�Ŷ������Ӱ��Ĺ��ơ�
���ṩ��һ�ֿ˷����ɲ��Ŷ���ģ��ʧ��Ӱ��ķ������ƣ��Ŷ����ƿ��Բ��ê�Cutler����ķ���������SISOϵͳ��
����y(i)��ʾ��ǰ����ֵ��u�ͦ�u�ֱ�Ϊ�����ڲ���ʱ�̵����������仯��ai�ǵ�λ��Ծ��Ӧϵ����N��ϵͳ��ģ��ʱ�����Ŷ�Ϊ��Ծ�Ŷ���
����ʽ(1)������ϵͳ����̬�Ż��������Ǹ���Լ��������Ա������һ���Ż������Ŀ���Ҫ��������ľ���ָ�꣬����Ԥ������е��趨ֵ��
Ŀ��滮�ۣ��ݵ�Ŀ�꺯���ǰ���Ŀ��Լ����������ƫ�����������Ӧ�����ȼ�ϵ��������ģ���ÿһ��Ŀ��ֵȷ���Ժ��Ż���Ҫ���Ǿ����ܿ���Ŀ��ֵ�����ȼ���Ҫ����ʵ������������蹲��k�����ȼ������ȼ�ϵ��Pi(i=1,2������k)����P1>>P2>>����>>Pk��һ���������Ŀ��Ⱦ���Ŀ������ȼ�����Ҫ����Ŀ��ȴ�Ҫ����Ŀ������ȼ��ߡ���ʵ��Ӧ�������ȼ�ϵ��ֻҪ��֤���ȼ����Եõ����ּ��ɡ�
������趨ֵ�Ż���ôĿ�꺯����minz=f(d+,d-)������Dz�����ijһ������������Ŀ�꺯��Ϊminz=f(d��)������Dz�С��ijһ������������Ŀ�꺯��Ϊminz=f(d��)����������������Ŀ��Ϊ��������������ۺϡ�������ƫ��d����ʾ����ֵ����Ŀ��ֵ�IJ��֣���ƫ��d����ʾ����ֵδ�ﵽĿ��ֵ�IJ��֣���ص�d+��d-�ض�����һ�����ڣ���������һ��ʵ����˵������Ŀ��滮����̬�Ż����ԡ�
��1�ۣ��ݹ�������������Ʒ���������������ɵ����ͷ��������������¶��Dz���Լ�������ݱ����������Ͳ��ߵij���Լ����Ļ�������������������������װ�û��ȣ�������Ϊ�ǿɲ��Ŷ���4���������u3��������ֵ̬���������������1��
ʹ����̬���沢�� ��ô��̬ģ����ʽ(3)����������
��ô��̬ģ����ʽ(3)����������
ģ���· ģ��оƬ �������� �Ŵ��� ADI ģ����� ������£�
- 12λ����A/Dת����MAX187��Ӧ��(10-06)
- AGC��Ƶ�Ŵ������(��)(10-07)
- ���ġ�3V������ѹ������0.05% ��A/D�任��(10-09)
- PIC16C5X��Ƭ��˯��״̬�ļ����ѷ���(11-16)
- �ü����Ը߿�����ϵͳ�еĵ�Դ�������ֻ�����(10-02)
- ����GM6801ʵ�����ܿ��ٳ�������(11-20)