CAN调度理论与实践分析
CAN调度理论与实践分析
CAN总线中消息能否按时送达是事关系统安全等问题的重要指标,它要通过调度分析加以验证。本文介绍CAN调度理论的新研究成果,以及对工程应用的指导意义及其实施难点。具体分为4个部分:Tindell的分析方法和Davis的改进;笔者对Davis算法的简化;最坏响应时间分析在应用上的一些结果;调度分析在应用上的难处。
关键词 CAN 调度理论 响应时间 Davis算法 Tindell算法
分布式嵌入式系统是当前嵌入式系统的重要发展方向,因为它能提供更强的性能,节约系统的总体成本。但是由于各单个节点必须有通信网络相连才能协调地工作,网络就成了关键部分,没有网络提供及时正确的数据和命令,就谈不上所设计的系统服务了。在汽车的分布式嵌入式系统中,目前主流的通信网络是CAN总线。CAN是事件触发的通信协议,它根据消息的优先等级和节点的状态自动地调度消息的传送。低优先级的消息会因同时发生的高优先级消息太多而不能及时发送,高优先级消息也有可能由于节点状态等的影响而丢失。关于CAN的局限问题可见参考文献[1]。本文主要从调度理论方面讨论CAN系统的问题,这些问题与工程应用有非常大的关系,实践意义很强。
1 Tindell的分析方法和Davis的改进
1994年,Tindell [23]首先将分析单处理器任务调度方法改造成适用于CAN总线的调度方法,求取消息的最坏响应时间。对于与安全相关的应用,只有对最坏响应时间有确切的掌握,才是合理的。CAN通信在网络上的实现经过2个阶段:通信任务将消息发到发送的通信控制器(CC),发送的通信控制器将消息发到接收的通信控制器。广义地讲,响应时间是从需产生通信的事件发生到消息到达目标节点的时间,包括发送节点host内的处理时间,host到CC的时间,总线上消息仲裁传送时间,接收CC到host的处理时间。仲裁获胜的消息开始传送后,便不能被中止,所以CAN调度是固定优先级非抢先式任务调度。消息m用到的参数定义如下:
Tm ——启动通信的事件间隔,即周期;
Jm——由事件发生到消息开始送CC的时间之最大变化,即抖动;
Cm—— 在总线上传送消息m所需时间(要考虑位填充形成的最大值);
Dm——由应用决定的传送消息m允许的时限;
Rm——实际的最坏传送时间;
Wm——传送消息m时最坏等待时间。
它们之间的关系如图1所示。
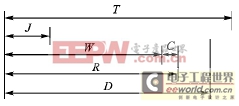
图1 用于调度分析的时间参数
Wm由2部分构成:由低于优先级m的消息(其集合写为lp(m))正在总线上传送而造成的阻塞Bm,和由高于优先级m的消息(其集合写为hp(m))在总线上抢先传送而造成的干扰Im。它们取最大值时就使Wm成为最坏等待时间。
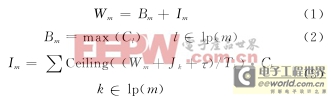
为了印刷的方便和易于理解,这里用了不同的写法,其中顶函数Ceiling返回的是最接近(大于等于)变量的上限整数, τ是1位时间。Ceiling( (Wm+Jk+τ)/Tk)表示在Wm时段内高优先级消息k会出现的最多次数。于是有:
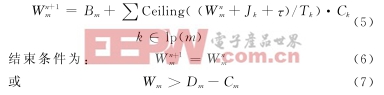
Wm取离散值且出现在非线性方程(4)的两边,所幸的是其求解并不难。在式(5) 中,用W0m=Bm作为初值循环求解即可。
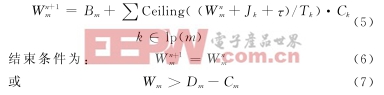
式(7)代表最坏等待时间已超时限,消息m不可调度。
按优先级降低的次序逐条校验消息是否可调度,就可验证整个通信系统是否可调度。
在2006年实时网络会议上,Bril、Davis等人发表了有关Tindell算法有漏洞的文章,后来他们又提出了完整的改进算法[4]。作为反例,表1中消息C用Tindell算法是可调度的,最坏响应时间为3 ms;但第2次消息C的传送已超时限,如图2所示。Tindell算法仅考虑了消息C的第1次传送。
表1 Tindell算法的反例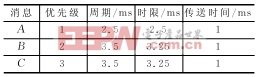
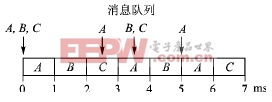
图2 消息C的最坏响应时间为3.5 ms
另外,如将消息B和C的周期缩短为3.25 ms,按照Tindell算法,系统由于未求得最大的最坏响应时间,故仍是可调度的,但实际上总线的利用率已超过100%。Davis的方法核心是引入忙周期的概念,再对忙周期内各次传送的响应时间求最坏值,详见附录1。(见本刊网站www.mesnet.com.cn——编者注。)
Tindell的开创性工作对后续的研究与应用有巨大的影响,Volcano通信技术公司(现在的Mentor Graphics)以此理论为基础开发了商用的CAN调度分析软件。由于漏洞的发现,用户应检验软件是否有了新的补丁以及用它完成的应用是否受影响。
2 笔者对Davis算法的简化
Davis算法要先算出忙周期,再在忙周期中消息m多次传送中寻找最坏等待最大的那次。基于以下考虑,计算可以简化:
在忙周期中,消息m传送时有高优先级消息进入队列,使m的后续消息发送前可能插入更多的高优先级消息,代表仍有一个对总线需求的高峰,从而有可能使后面的消息m有更大的最坏响应时间。
最坏的情形是消息m刚发送,所有高优先级消息就进入
- 基于CAN总线的RS-232串口设备远程通信(01-18)
- 现场总线CANbus与RS-485之间透明转换的实现(01-26)
- 支持CAN总线的电动车辅助逆变电源的设计(02-23)
- 单片机和MCP2510的CAN息线通信模块设计(05-03)
- CAN总线/RS232接口的设计(10-12)
- 机车空调逆变电源控制系统及其实现(06-21)