SAR ADC驱动运算放大器的选择
时间:05-03
来源:互联网
点击:

其中:k =12,由此可以实现562kHz的带宽。
低噪声系统可以采用尽可能高的带宽,但是,也不要把带宽设置得过高。因为带宽越高,其所允许的噪声也就越高,所以应在 RC 设定时间和该带宽之间取得一个平衡值。为了确定 RC 滤波器的最佳值,我们使用一个低输出阻抗的信号源。注意,最终计算结果应包括信号源的输出阻抗。在该示例中,该阻抗为 20Ω。从这些测量结果中发现,当 k = 7 时,可获得最佳 THD 值;而当 k = 6 时,可获得最佳的 SFDR 值。并且,k 值越小,RC 滤波器的带宽也就越低,从而降低了噪声。然而,当 k 值变小时,性能也随之降低。出现这种情况是因为时间常数太大,而且它不能对采样电容器上的输入电压进行相应的设置,从而导致测量误差的出现。
结论
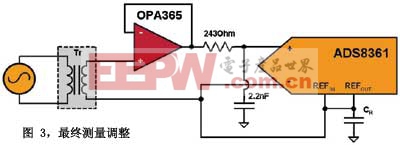
为了完成信号链的最终性能评估,选用当k = 6.36或截止频率 = 298kHz 时的RC滤波器。在这种前提下,我们采用一只2.2nF的COG型电容器和一只243Ω的电阻。
当采用ADC最高的采样速度时,采集时间为 400ns。采用上述相同标准(k = 6.36)时,一阶滤波器的有效噪声带宽为 4MHz。当采集时间由 400ns 延长至 3.4ms 时,有效噪声带宽则下降为 562kHz。图 3为最终调整图。
- 适用于SAR ADC的CMOS比较器的设计(01-02)
- 采用差分PulSAR ADC AD7982转换单端信号(10-01)
- 最佳的解决方案带来高精度(01-22)
- 精密SAR模数转换器的前端放大器和RC滤波器设计(02-11)
- 低功耗 ADC(04-06)
- 逐次逼近型(SAR)模数转换器在马达控制中的应用(06-15)