无人机导航系统抗干扰措施
摘要:通过介绍无人机导航系统的接收机特性,分析了无人机GPS 信号不稳定的原因,并采取合理布局GPS接收天线的位置、在GPS 接收天线与设备特别是有源设备之间加入隔离装置等措施,提高了无人机导航系统的抗干扰性。
引言
无人机关键技术之一是导航/飞控系统,它是无人机安全飞行、有效完成任务的重要保证。当前的卫星定位系统包括美国的GPS、俄罗斯的Glonass 及中国正在研究的北斗系统。其中,GPS 导航系统主要负责GPS 信息采集、电子罗盘信息采集、坐标转换、飞行控制策略确定及控制任务执行等工作。GPS 的灵敏度非常高,如何提高GPS 导航控制系统的抗干扰性就显得相当重要。
1 GPS 导航系统的接收机特性
GPS 是一种全向天线,需要借助于低噪声放大器来提高其增益,达到高增益和高灵敏度的性能要求。
GPS 卫星信号所包含的载波、测距码(包括P 码、C/A码)、数据码(导航电文,或称D 码)都在同一个基本频率f0=19 MHz 控制下产生的。其中载波是GPS 卫星信号取无线电波中L 波段的两种不同频率的电磁波。其中的一个载波上调制有2 MHz 的伪随机噪声码(称为粗码或C/A码)、20 MHz 加密的伪随机噪声码(称为精码或P 码)。在另一个载波上调制有精码和导航电文,区别不同卫星采用码分多址,C/A 码用于普通测距并过渡到捕获精码,精码用于精密测距,一般用户只能用C/A 码。
在20 000 km 高空飞行的GPS 卫星,向地面用户发送的导航定位信号(GPS 信号)是一种可供全球用户共享的空间信息资源,但其信号强度极其微弱,即使在天顶运行的GPS 卫星,其信号到达GPS 接收天线时,信号电平约为-129.6 dBm,如此微弱的GPS 信号极易受到系统电磁环境的电子干扰。而GPS 接收机依赖于GPS 卫星(SV)发射的外部射频(RF)信号工作,所以GPS 接收机很容易受到RF 干扰的影响。RF 干扰能使GPS 接收机导航精度性能降低或使GPS 接收机跟踪完全丢失。
1.1 电磁环境电平
电磁环境电平的定义:在规定的试验地点和时间内,当试验样品未通电时,已存在的辐射及传导的信号和噪声电平。
图1 中是GJB 151A-1997 中给出的RE102 极限值曲线。
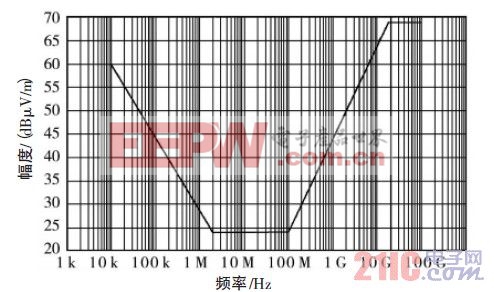
图1 RE102 极限值曲线
GPS 接收机接收到的信号电平必须低于RE102 极限值曲线。
1.2 GPS 灵敏度
GPS 灵敏度是指GPS 接收机的灵敏度,是GPS 接收机最为重要的性能指标之一,它包括:跟踪灵敏度、捕获灵敏度、初始启动灵敏度。
GPS ICD(Interface Control Document,接口控制文档) 文件规定的GPS 系统L1 频段C/A 码信号功率最小值为-160 dBW,即GPS 灵敏度S=-130 dBm.GPS工作频率f=1575.42 MHz,其信号波长λ=19 cm。
1.3 GPS 天线系数
工程上常根据天线增益来计算天线系数,表示为:

换算成dB 表示为:

为了计算方便,写成如下形式:

式中,f 为频率(MHz);G 为GPS 天线增益。
GPS 天线增益包括无源天线增益和有源放大器增益两部分,其中无源天线增益Gp=-4 dB,有源部分的增益Ga=40 dB。
通过式(3)可知,工作频率f=1575.42 MHz 的GPS 天线,其无源部分的天线系数AF = 38.1979 dB。
根据RE102 极限值,在f=1575.42 MHz 上背景电平的幅度最大值约为L=46 dBμV/m。
GPS 接收机前端的信号最高能量为:
所以,GPS 接收机前端信号最高能量为47.8 dBμV即-59.2 dBm。
由于GPS 接收机的灵敏度为-130 dBm,满足RE102的设备级辐射发射的最高信号要比GPS 灵敏度高大约70 dB,可能对GPS 接收机造成干扰。也就是说,无人机系统在该频点的信号电平很可能超过GPS 信号电平,进而对GPS 接收装置造成干扰。
2 GPS 导航系统干扰分析
GPS 导航系统干扰通常分为四类:带干扰、连续波干扰和脉冲干扰。
(1)宽带(WB)干扰指占用两个调制带宽的干扰信号。
它是干扰GPS 信号最有效的方式,一般难以被滤除掉。
(2)窄带(NB)干扰指占用带宽大于1 MHz,小于等于整个C/A 码带宽的任何有害信号。窄带干扰主要围绕着载频集中发射干扰信号,以达到最大的干扰效果。
(3)连续波(CW)干扰指占用带宽小于100 MHz 的干扰信号。它主要在一定频率上产生单尖峰噪声,如果它集中在扩频谱信号的截频附近,将极具破坏性,但它容易从所接收的信号中被滤除掉。
(4)脉冲干扰指采用脉冲持续时间极短、功率很大的信号。这些信号相当于噪声源,会使数据流产生猝发性误差,它对理想接收机中的数据检测器很不利。它可以通过在发射的GPS 信号中加入衰减校正能力,或者通过估计干扰机状态(有或无),并在有干扰机时忽略其数据而进行补偿。
在某型无人机系统的试飞试验中,曾出现过无线电数据链设备干扰GPS 的现象。无人机在飞行过程中,GPS信号突然不稳定,甚至收不到
- ADI:用高效MEMS开启民用无人机新纪元(04-15)
- 无人机系统模块开发设计与仿真(04-18)
- 物联网热门应用:无人机/VR/智能手表由哪些传感器组成?(04-13)
- 北斗卫星导航系统行车记录仪的优化设计(10-29)
- CSR定位平台可与中国北斗二号卫星导航系统同步运行(12-04)
- 基于GPS/INS实现某自行高炮导航系统的改造设计(06-24)