高清裸眼3D单芯片最佳解决方案
图3中,A位置能正常看到3D效果,而B位置看到的3D效果却是错误的。因为两个眼睛所看到的图像存在着交换,这就造成了3D层次感与应该表现的层次感完全相反的效果。而人眼又不能自动调节这种相反的效果,因而造成了严重的头晕现象。处在切变区域所看到的3D效果我们称之为“反视”。在这种情况下,观众会发觉本应处在远处的物体反而离自己更近,本应处在近处的物体却离自己更远,跟我们平时的生理习惯形成很大反差。
为解决观看区域受限制的问题,SuperD研发了一种把头部追踪技术集成到原有3D显示方案中的3D显示设备。图4为头部跟踪技术的示意图。
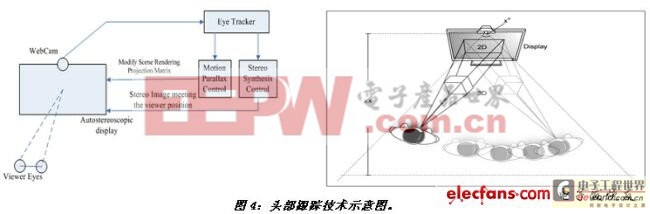
SuperD利用跟踪技术获得观众的三维位置,然后根据位置调整3D图像的像素排列,生成新的符合该位置的3D图像,这样就解决了观看区域受限的问题。目前的跟踪技术还只能针对单个观众。头部跟踪技术本身是可以跟踪多个用户的,但由于存在显示面板刷新率和分辨率的局限,还不适合多个用户同时使用。这也是该技术被首先应用到笔记本电脑和其他移动设备上的原因。SuperD的头部跟踪技术要求的跟踪精度非常高,精确到厘米级,并且是用一个摄像头来完成的。这是目前很多头部或者人脸跟踪技术所达不到的。
此外,头部跟踪技术目前除了可以解决单个用户的观看区域受限问题外,还可以用来处理很多其他应用,比如与显示设备的交互,在游戏控制中用来增加游戏的可玩性,用眼睛控制鼠标来实现与应用软件的交互等。因为SuperD所采用的头部跟踪技术可以用一个摄像头来获取空间位置,所以也可以把它用在测量领域。
3D图像处理芯片
SuperD的3D图像处理芯片提供了单芯片集成方案,不但可以接收、还可以处理和发送显示图像数据流,同时也会根据图像内容的不同而调整并控制屏幕的光学设计部分。在图像数据通路之中,芯片会自动检测图像的格式,比如,分辨率的大小、显示图像帧的基本参数等等。这些参数经过内部运算处理之后,在保证不改变数据流带宽/吞吐率的前提条件下,会被图像数据流发送模块再次打包同步,发送至屏幕的显示单元,从而实现无缝接入和处理。与此同时,同步控制逻辑也会在预先设定好的工作模式下,根据图像2D/3D区域来控制屏幕双折射光学器件的驱动电路,使之在符合特定电压的条件下开启透镜的折射效果,呈现出3D显示和传统2D显示区域。这种不同显示区域的控制和图像的处理,不仅要保证控制的同步,还必须考虑到2D和3D图像所具有的不同延迟属性,保证图像的瞬时连续性和带宽的匹配。
目前,SuperD的3D芯片已经支持全高清的分辨率,并已针对不同种类的3D内容格式内置了对左右格式、上下交错格式等的支持。对于上层软件而言,这种多格式支持只需通过使用相关配置接口对3D芯片进行配置即可完成,因此,这种动态配置的实现使得上层软件可以直接操作硬件资源和扩展应用范围。
在图像的处理上,SuperD的3D芯片采用的独特设计思路使用了行缓存代替传统图像处理芯片中帧缓存的方法。仅此一项,行缓存就可以节省数倍的系统功耗,并降低了解决方案的成本。
运动视差技术的实现
要得到立体视觉效果,除了通过两个眼睛分别采集具有视差的图像供大脑合成立体视觉外,还有一个重要的单目立体因素,那就是运动视差效果。运动视差是观看者在自身发生位移的情况下所看到的周围物体在运动方向上和速度上的差异。图5是描述运动视差的示意图。
从图5中我们可以看到,当观看者位置发生变化时,应该看到不同的物体侧面,并且距离观看者远近不同的物体发生的相对位移也不一样。集成运动视差现象的应用可以很明显地提高用户的沉浸感。目前有些2D显示下的应用也开始考虑运动视差现象,以此产生一种虚假的立体感觉来提高应用的吸引力。

SuperD通过把运动视差技术与3D显示技术相结合,将更能增加3D显示的真实性和沉浸感。因此,结合头部跟踪技术,我们提出了一种含有运动视差的3D显示技术。目前该技术还主要用于游戏应用中。因为现在的游戏开发方法本身就包含了对场景的三维描述信息,所以我们要做的是把这些信息提取出来,并结合跟踪技术得到的观众位置来实时地修正游戏场景的矩阵信息,以此产生对应不同视点位置下的不同渲染效果,使用户形成运动视差的感觉,从而提高3D显示技术的沉浸感。图6是运动视差与3D显示相结合的示意图。

在图6中注意观察两个立方体的显示变化。这里3D显示设备除了提供根据观看者位置而新生成的对应该位置的3D图像外,还把3D图像按照运动视差要求进行处理。
Z轴优化
如何让模拟出来的3D世界与真实的3D世界尽量接近呢?SuperD提出一种称为Z轴优化的概念。在3
- 高清晰电视基础:揭密显示屏幕背后的电视技术(01-13)
- 并不总是坏消息,FPD产业精彩才刚刚开始(01-11)
- 全高清电视的电源发展趋势解析(04-16)
- 高清视频CMOS电流舵数/模转换器的设计(06-07)
- 在高清显示器上优化标清视频(08-15)
- HDTV整合闭环架构与开环架构分析(08-25)