水下航行器模拟平台智能小车的设计
时间:04-17
来源:互联网
点击:
卫星接收模块采用中国台湾省长天科技股份有限公司产品,型号为GM-82,是一个具备全方位完整的卫星定位接收器。 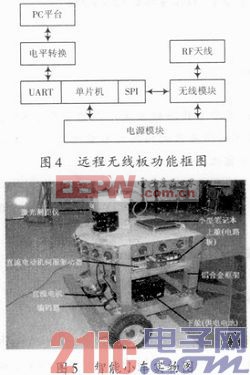
2.3 电机的驱动部分
主要由空心杯直流电机、ED系列直流电动机伺服驱动器和编码器组成,通过单片机的普通I/O口和PWM控制直流电机驱动器,使空心杯直流电机在驱动器的控制下转动,编码器负责测量电机的实际转速,在程序上用电机的转速闭环(PID)控制,用无线控制手柄对速度进行实时的控制。实物图如图5所示。
3 程序软件设计
单片机程序包括电源管理、无线控制、数据采集和电机驱动四大功能模块,PC机软件包括界面、数据接收与处理、数据存储和电源状态四部分,流程图如图6~图9所示,PC软件如图10所示。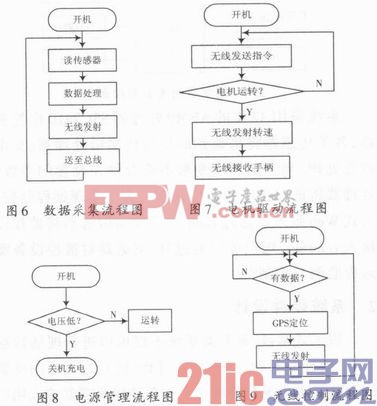
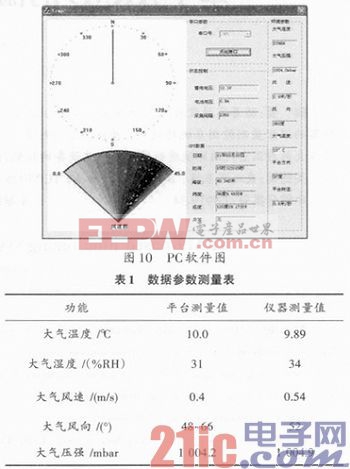
系统测试在空旷的地方并且人为的设置障碍完成,验证小车的功能和工作状态以及各种传感器的可靠性和精度,用电风扇模拟风,热风枪模拟气温升高,观察PC界面软件,测得的数据与相关仪器测得的数据进行比较,结果见表1。
5 结语
本项目准备开发与研制一种陆路智能的运载平台,用来仿真水下航行器的自身定位与地图的构建,并且通过一些传感器将周围环境的参数通过平台传递给远程的控制平台,以便获取环境的信息。从测试数据中可以看出,智能运载平台各项功能均能正常工作,基本能够满足设计所提出的性能参数要求。
- “优化”使模拟IC达到极限性能(01-23)
- 单收/单发RS-232接口芯片 ADM101E及其应用(01-25)
- 通信电源监控系统模拟量采集模块的设计(01-05)
- 设计高性能、低成本的笔记本电脑处理器电源 (05-12)
- 利用0至1V模拟乘法器实现电池供电系统的精确功率管理(05-05)
- 采用新型放大器实现高性能的电流检测(05-10)