TLK6002/10002 Local Deep Loopback 的原理及注意事项
时间:04-28
来源:
点击:
Issn 决定的放大倍数进行放大。
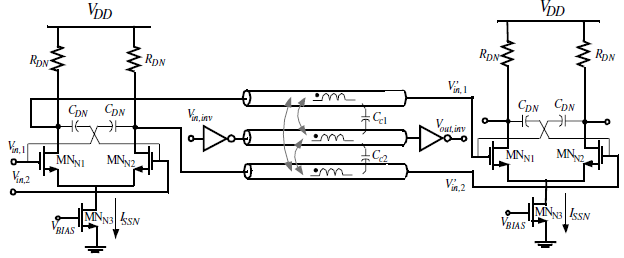
图七 CML 驱动器架构及耦合方式
如果需要关闭CML 驱动器的输出,则需要将差分输入的两端接到固定的电平上。
d. CDR 误码的接收
由上面的分析我们可知,在实现近端深度环回时,如果光模块仍然与TLK6002/TLK10002 相连,光模块噪声传送给TLK6002/TLK10002,而由于这个状态下RX 方向的CML 驱动器仍然处于使能状态,因此这个噪声将被放大后与环回方向来的正常信号叠加,传送给CDR。
由于CDR 对于输入信号的眼图有一定的要求,而叠加了噪声的信号显然不能满足这一要求,因此CDR 会产生大量误码使得环回失败。
3 TLK6002/TLK10002 近端深度环回的实现方法
综上所述,由于需要防止RX+/-端产生的噪声被叠加在环回信号上输送给Serdes 的CDR,才能确保环回的正确进行。因此理论上需要将CML 驱动器置于Idle 状态。
TLK6002/10002 可以断开SFP+的连接,并将RX+/-接至高电平,能确保CML 驱动器进入Idle 状态,从而实现深度环回的正常进行。
- DPA-Switch为应对PoE受电设备设计挑战提供有效解决方案(11-06)
- 在射击探测器中增加口径确定功能的简单电路(11-13)
- 用LatticeXP FPGA 桥接吉比特媒体独立接口(01-18)
- 单片机与串行AD转换器TLC0834的接口设计(01-22)
- 8位高速A/D转换器TLC5510的应用(02-16)
- 改善平板显示器的音频性能(02-13)