仿生机器蛇的设计
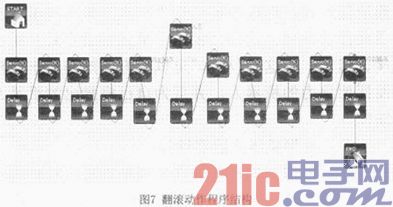
以360°的翻滚,如图7所示。
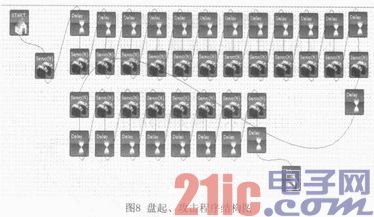
3.4 蛇形机器人一盘起、攻击动作
蛇形机器人盘起、攻击的动作是比较综合的一个动作,因为不同的需要,每个动作中每个舵机的速度要求也不一样。其程序结构如图8所示。
还有蛇形机器人的其他连贯动作:1)蠕动动作,可以视为蛇类的直线运动,利用这种移动方式可以使蛇形机器人沿着一条直线前进。而且即使改变了外界环境,也可以根据环境,对机器人进行适当的调节,适应性强;2)侧移动作,利用蛇身扭动与地面产生的摩擦力使整个身体发生位置的改变,动作简单,可以通过改变该动作的重复次数来改变运动方向,即使环境改变,对蛇形机器人的侧移也没有太大影响。
4 系统的实现
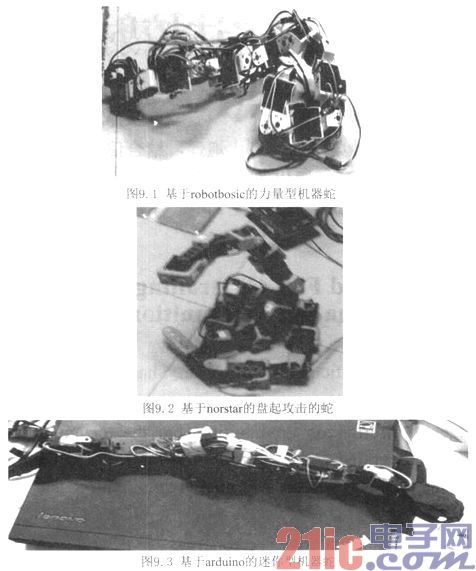
系统实现了三种平台的仿生机器蛇,如图9所示:1)基于robotbosic设计的力量型机器蛇,有十四个自由度舵机组成,每个自由度大约1.2cm。能完成诸如扭动、前进、蛇头上扬等动作。小体积是我们的一大特色,简化了供电装置,将电源与舵机经过特殊的处理装置在一起,让动作更加方便,同时也减少了大量的外迁线,使蛇能更加灵活;2)基于norstar可蠕动前进和盘起攻击的仿生机器蛇,最终完成了一条14个自由度、长约1.2m的大蛇,一条7个自由度、长约0.6m的小蛇,实现蛇的基本动作,将驱动装置安装到蛇身体上,缩小蛇身体体积。实
物如图8所示。优点在于有短信和来电两个功能,不足之处探测器过于敏感;3)基于arduino设计的迷你型机器蛇,共有八个小舵机组成,共15cm。蛇头与蛇尾增加泡沫设计使蛇的形象更加逼真。小蛇能够左右摆动,还能向前蠕动前进。
5 结束语
本文所研制的三种机器人基本是用舵机串联而成,结构简单,连贯动作能舒展完成,但不足是蛇形机器人由十几个舵机串联而成,因为串联的舵机数量太多,导致驱动电流越来越小。建议改进措施有:1)利用一个电流放大电路增大驱动电流;2)由于串联的舵机数越多,驱动电流就越小,所以如果在条件允许的情况下,可以选择减少几个舵机;3)将所有舵机并联,这样可以使各个部分舵机电压相同,驱动电流也趋于稳定。
- CAN总线在波动仿生推进器中的应用(08-24)
- 12位串行A/D转换器MAX187的应用(10-06)
- AGC中频放大器设计(下)(10-07)
- 低功耗、3V工作电压、精度0.05% 的A/D变换器(10-09)
- PIC16C5X单片机睡眠状态的键唤醒方法(11-16)
- 用简化方法对高可用性系统中的电源进行数字化管理(10-02)