仿生机器蛇的设计
摘要:文章主要描述仿生机器蛇的设计,包括机器蛇的结构设计和运动规划连贯动作的实现。通过对蛇形机器人在有障碍物和无障碍物环境中,进行不同连贯动作的运动规划和运动形式变化,找出机器人设计的不同侧重点;最后,将对本文的不足和实验时所遇到的困难进行总结,并加以展望。
0 引言
随着社会的发展,人类的需要,一些在特定环境中拥有独特技巧和能力的机器人应运而生,蛇形机器人就是其中一种。蛇形机器人是根据蛇的骨骼和运动原理所制造的仿生机器人,凭借其独特的运动形式和身体结构,应用前景可以说是无可限量。
1 系统总体构成
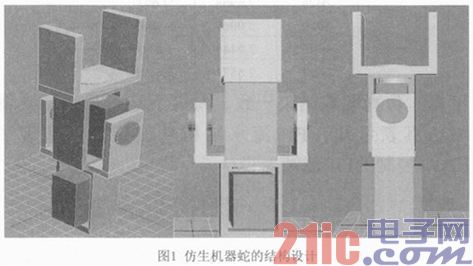
本文所研究的蛇形机器人采用Solid Snake(SS)机构设计。Solid Snakc利用垂直和水平方向正交的关节来模拟蛇类生物柔软的身体,每两个正交的关节组成一个单元体,每个单元体相当于一个万向节,具有两个方向的自由度,整体形成一个高冗余度的结构体。这样的机构设计使蛇体具有向任何方向弯曲的能力。其壳体机构、舵机与壳体安装方式和两个单元连接方式,即以垂直→水平→垂直的方式相连接,以模仿生物蛇的关节,如图1所示。
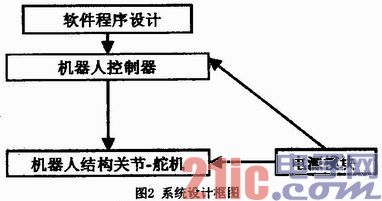
系统总体设计框图如图2所示。首先在计算机上测试每个插座对应的舵机,简而言之就是对号入座,首先找出每个舵机的零点位置,然后编程,将已编写好的程序下载到控制板里面,通过控制板实现对舵机的直接控制,电源控制板为所有的舵机提供动力,最后经过多次的调试仿生机器蛇即可以完成一套连贯的动作。
2 仿生机器蛇的运动规划
要想完成仿生机器蛇在现实环境中自由运动,就需要先对其进行运动力学分析和路径规划。
2.1 仿生机器蛇的运动力学分析
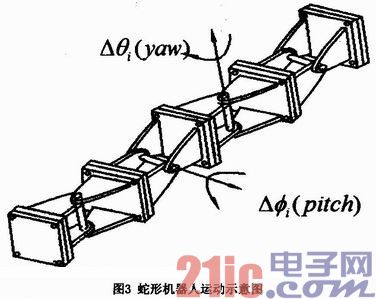
本文所研究的蛇形机器人由垂直方向与水平方向交替连接,依次可以做二维运动。而每个舵机的范围在-90°~+90°之间。当蛇形机器人在平面上运动时,它的运动示意图如图3所示。
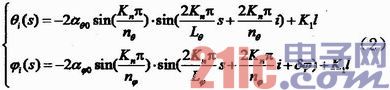
(1)平面蜿蜒运动。平面蜿蜒运动是通过控制关节模块水平轴的关节保持直线,而垂直轴的关节呈正弦变化实现;采用的算法公式为:
(2)侧向运动。侧向运动是控制关节模块的垂直轴的关节和水平轴的关节都呈正弦变化,两个曲线之间有一个相位差;采用的算法公式为:
(3)伸缩运动。伸缩运动方式可以通过控制它的垂直轴的关节保持直线,而水平轴的关节呈正弦的变化实现。它的垂直面内运动,适合穿越狭小的管道。采用的算法公式为:
(4)翻滚运动。翻滚运动是控制关节模块的垂直轴的关节和水平轴的关节变化而实现,其采用的算法公式为:
2.2 仿生机器蛇的路径规划
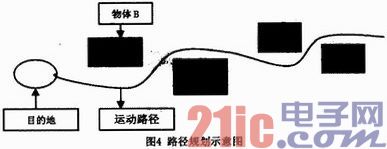
所谓的路径规划就是指在障碍物的环境中,按照某一特定的评价标准,寻找一条从起始状态到目标状态的不会发生任何碰撞的路径。如果把运动物体看作是所研究的问题的某种状态,把障碍物看成是所要解决的约束条件,无碰撞路径规划就是满足次约束的解,因此空间路径规划可以描述成求解满足约束条件的过程。为了更好地理解路径规划,可以将其分解成两个问题。
(1)寻找空间问题。在某个指定区域R内,确定物体的安全A位置,使其不与在次空间内的已有物体B发生碰撞。
(2)寻找路径问题。在以上指定区域R内,确定物体A从初始位置到目标位置的安全途径,使其在移动过程中物体A与物体B不发生碰撞。
图4表示的就是在障碍物环境中物体A在不碰撞物体B的情况下到达指定区域。
3 仿生机器蛇连贯动作的设计
软件采用C语言编写,舵机控制程序进行相应模块化设计,形成基本动作“积木”单元,组合连贯动作套件包。这些“积木”单元都很容易互相拼接、组装。用这些“积木”可以很方便地搭建出各种发挥想象力的机器人,并可为自己搭建出的机器人编程。
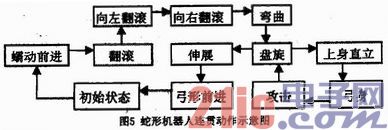
3.1 蛇形机器人连贯动作
蛇形机器人的连贯动作主要是将前面几种运动策略连接而成。图5所示为蛇形机器人连贯动作结构图。
3.2 蛇形机器人一爬行运动
蛇形机器人的爬行动作,属于蛇类的蜿蜒运动,自然界中蛇类的运动都是“S”形的,类似于正弦曲线。由于实验条件的限制,本研究所做的爬行动作以“弓”形代替。如图6所示。
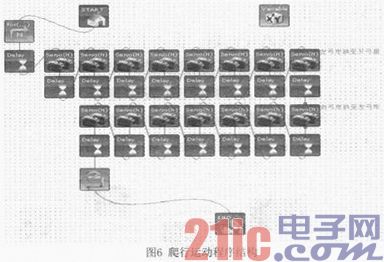
以下实验数据,表示着蛇形机器人由左“弓”形到右“弓”形时的各个舵机的角度,因为爬行动作并不需要太快,所以速度全都设置为150。这样每个动作的变化都不是很快,但是相应的蛇形机器人所做的每个动作都很平稳。每个动作完成后有2s的延时。爬行运动的程序结构如图6所示。
3.3 蛇形机器人一翻滚动作
蛇形机器人的翻滚动作属于蛇类的侧向运动。翻滚动作的实现首先要使蛇形机器人有一定的弯曲,然后在固定两个点,调试其余的舵机,使其可
- CAN总线在波动仿生推进器中的应用(08-24)
- 12位串行A/D转换器MAX187的应用(10-06)
- AGC中频放大器设计(下)(10-07)
- 低功耗、3V工作电压、精度0.05% 的A/D变换器(10-09)
- PIC16C5X单片机睡眠状态的键唤醒方法(11-16)
- 用简化方法对高可用性系统中的电源进行数字化管理(10-02)