机器视觉软件在感兴趣区域中的应用
时间:06-11
来源:互联网
点击:
在采用机器视觉技术对部件进行检测时,并不一定需要对整个部件进行检测,即不需要处理相机所拍摄的整个图形,而只需要对部件上的一部分进行检测即可。如果对整个图形进行处理,将增加许多处理时间。机器视觉软件sherlock制定了多种不同类型的PEEK工具,包括面PEEK、线PEEK和点PEEK,使用户能够根据需要选择感兴趣区域,处理图形上有关的区域,从而极大地缩短处理时间,参见图1。

面PEEK(感兴趣区域)

大多数机器视觉软件只能处理矩形PEEK,但是在某些情况下,所需要检测的图形特征并不是矩形,而可能是平行四边形、环面等形状。如果利用矩形PEEK对其进行处理,将增加处理区域,从而增加处理时间。针对这种情况,Sherlock软件制定了四种面PEEK(感兴趣区域):矩形(rect peek)、平行四边形(parallelogram peek)、环面(annulus peek)、圆环面(torus peek)。
在某些图形中,并不一定是对矩形区域进行处理,有时候可能处理的是平行四边形、或一个圆环面,如果只是利用矩形PEEK,所处理的区域就将变大,处理时间增加。这时如果利用相应的平行四边形PEEK或圆环面PEEK,就可以减少处理的区域,从而降低处理时间,如图2所示。
线PEEK(感兴趣区域):
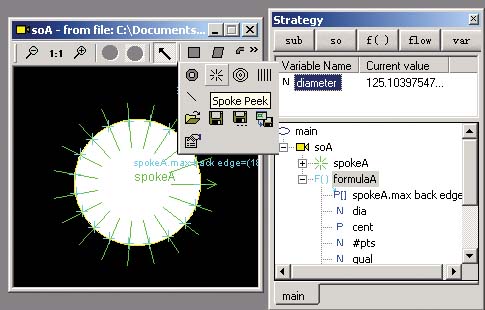
在利用机器视觉进行工业检测时,如果要对零部件进行尺寸测量,通常需要找出所检测的零部件的边缘,这时可以利用线PEEK来找到边缘点,然后进行尺寸测量。但是在实际检测中,所要检测的零部件的边缘并不是按线形分布,如圆的边缘或齿轮的齿等。如果只利用直线进行边缘检测,将很费时费力。Sherlock软件制定了六种线形PEEK,可以很方便地进行边缘检测。这六种线PEEK包括单线(line peek)、圆(circle peek)、圆弧(arc peek)、轮辐形(spoke peek)、牛眼形(bull's eye peek)、耙形(rake peek)。
如图3,当用户检测圆的直径时,只需要利用轮辐形PEEK来找到圆的边缘点,然后利用sherlock中拟和圆的函数,用这些边缘点来拟和一个圆,从而很方便地求出圆的直径。
面PEEK(感兴趣区域)
大多数机器视觉软件只能处理矩形PEEK,但是在某些情况下,所需要检测的图形特征并不是矩形,而可能是平行四边形、环面等形状。如果利用矩形PEEK对其进行处理,将增加处理区域,从而增加处理时间。针对这种情况,Sherlock软件制定了四种面PEEK(感兴趣区域):矩形(rect peek)、平行四边形(parallelogram peek)、环面(annulus peek)、圆环面(torus peek)。
在某些图形中,并不一定是对矩形区域进行处理,有时候可能处理的是平行四边形、或一个圆环面,如果只是利用矩形PEEK,所处理的区域就将变大,处理时间增加。这时如果利用相应的平行四边形PEEK或圆环面PEEK,就可以减少处理的区域,从而降低处理时间,如图2所示。
线PEEK(感兴趣区域):
在利用机器视觉进行工业检测时,如果要对零部件进行尺寸测量,通常需要找出所检测的零部件的边缘,这时可以利用线PEEK来找到边缘点,然后进行尺寸测量。但是在实际检测中,所要检测的零部件的边缘并不是按线形分布,如圆的边缘或齿轮的齿等。如果只利用直线进行边缘检测,将很费时费力。Sherlock软件制定了六种线形PEEK,可以很方便地进行边缘检测。这六种线PEEK包括单线(line peek)、圆(circle peek)、圆弧(arc peek)、轮辐形(spoke peek)、牛眼形(bull's eye peek)、耙形(rake peek)。
如图3,当用户检测圆的直径时,只需要利用轮辐形PEEK来找到圆的边缘点,然后利用sherlock中拟和圆的函数,用这些边缘点来拟和一个圆,从而很方便地求出圆的直径。
机器视觉 相关文章:
- 基于LabVIEW构建智能的移动机器人及无人驾驶车(10-27)
- 机器人4-1-1:在一个月之内实现原型开发的四个平台(02-23)
- 使用NI公司LabVIEW软件和视觉硬件建立集成视觉和机器人的化妆品包装生产线(03-11)
- 机器人视觉(Robot Vision)简介(02-23)
- 为自适应机器人焊接开发WiseWELDING机器视觉系统(03-11)
- 一种视觉导航机器人的设计(03-22)