基于神经网络电机速度控制器的SOPC系统
时间:06-02
来源:互联网
点击:
3 应用举例
根据前面的仿真结果,把神经网络速度控制器应用在一个机械臂上,具体实验与结果如图6。
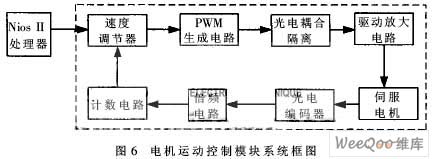
如图6,运动控制系统模块接收到速度给定信号和命令后进行速度调节。速度调节器的输出就是PWM脉宽调制电路的控制信号,之后产生PWM信号传给伺服电机驱动器驱动电机。速度反馈信号由装在电机轴上的光电编码器产生。为了提高反馈信号的分辨率,对光电编码器的输出信号进行倍频,从而提高了编码器的分辨率,也就提高了速度反馈信号的分辨率。速度调节采用神经网络参数辨识自适应控制。
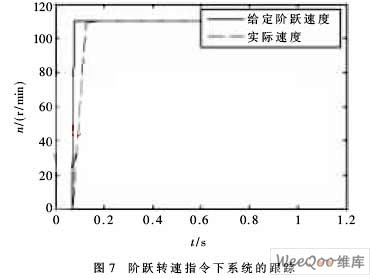
驱动对象是一台直流力矩电机,输入电压为DC27V,额定电流2.5A,最大空载转速600r/min。图7为空载状态下转速指令由0上升到 110 r/min的阶跃输入时的系统跟踪结果。由图7可知,系统能快速响应给定转速的变化,有较好的跟踪能力和稳定性。
本文运用神经网络控制方法并且通过FPGA中的硬件实现速度反馈调控电路,采用C++语言在FPGA片内集成的Nios Ⅱ软核处理器中进行坐标变换和轨迹规划,构成一个完整的机械臂关节速度控制器的SoPC系统。此方案使控制器系统的集成度变高,增加了系统的抗干扰性和稳定性,同时提高了系统调试效率和控制精度,是现代机器人伺服系统向模块化、智能化发展的方向。
参考文献
1. 周兆勇.李铁才.高桥敏男 基于矢量控制的高性能交流电机速度伺服控制器的FPGA实现 [期刊论文] -中国电机工程学报2004(05)
2. 范峥.刘宏飞.戚新波 交流伺服电动机神经PID自适应控制器的研究与开发 [期刊论文] -微特电机2006(08)
3. 王金明 Verilog HDL 程序设计教程 2005
4. 魏海坤 神经网络结构设计的理论与方法 2005
5. 李昂.王沁.李占才 基于 FPGA的神经网络硬件实现方法 [期刊论文] -北京科技大学学报2007(01)
6. Hikawa H A new digital pulse-mode neuron with adjustable activation function 2003(01)
7. 夏长亮 基于 RBF神经网络的超声波电机参数辨识与模型参考自适应控制 [期刊论文] -中国电机工程学报2004(07)
作者:河南科技大学 李利歌 阎保定 侯韶剑 姚良沽
来源:单片机与嵌入式系统 2008(10)
根据前面的仿真结果,把神经网络速度控制器应用在一个机械臂上,具体实验与结果如图6。
如图6,运动控制系统模块接收到速度给定信号和命令后进行速度调节。速度调节器的输出就是PWM脉宽调制电路的控制信号,之后产生PWM信号传给伺服电机驱动器驱动电机。速度反馈信号由装在电机轴上的光电编码器产生。为了提高反馈信号的分辨率,对光电编码器的输出信号进行倍频,从而提高了编码器的分辨率,也就提高了速度反馈信号的分辨率。速度调节采用神经网络参数辨识自适应控制。
驱动对象是一台直流力矩电机,输入电压为DC27V,额定电流2.5A,最大空载转速600r/min。图7为空载状态下转速指令由0上升到 110 r/min的阶跃输入时的系统跟踪结果。由图7可知,系统能快速响应给定转速的变化,有较好的跟踪能力和稳定性。
本文运用神经网络控制方法并且通过FPGA中的硬件实现速度反馈调控电路,采用C++语言在FPGA片内集成的Nios Ⅱ软核处理器中进行坐标变换和轨迹规划,构成一个完整的机械臂关节速度控制器的SoPC系统。此方案使控制器系统的集成度变高,增加了系统的抗干扰性和稳定性,同时提高了系统调试效率和控制精度,是现代机器人伺服系统向模块化、智能化发展的方向。
参考文献
1. 周兆勇.李铁才.高桥敏男 基于矢量控制的高性能交流电机速度伺服控制器的FPGA实现 [期刊论文] -中国电机工程学报2004(05)
2. 范峥.刘宏飞.戚新波 交流伺服电动机神经PID自适应控制器的研究与开发 [期刊论文] -微特电机2006(08)
3. 王金明 Verilog HDL 程序设计教程 2005
4. 魏海坤 神经网络结构设计的理论与方法 2005
5. 李昂.王沁.李占才 基于 FPGA的神经网络硬件实现方法 [期刊论文] -北京科技大学学报2007(01)
6. Hikawa H A new digital pulse-mode neuron with adjustable activation function 2003(01)
7. 夏长亮 基于 RBF神经网络的超声波电机参数辨识与模型参考自适应控制 [期刊论文] -中国电机工程学报2004(07)
作者:河南科技大学 李利歌 阎保定 侯韶剑 姚良沽
来源:单片机与嵌入式系统 2008(10)
神经网络 FPGA Altera 嵌入式 Verilog 电路 单片机 DSP PWM 信号发生器 仿真 Quartus 编码器 电压 电流 机器人 电动机 相关文章:
- 基于MSP430的自主式移动机器人设计与实现(06-12)
- 无线机器人的进化(02-23)
- 一种视觉导航机器人的设计(03-22)
- 精密运动控制器LM628的应用设计(06-20)
- 基于多传感器信息融合的移动机器人导航综述(10-28)
- 机器人视觉识别技术简介(09-25)