基于重复控制的双DSP+FPGA三相逆变器
时间:06-11
来源:互联网
点击:
基于双DSP+FPGA的三相逆变器的设计与实现三相逆变器作为现在一种常用的电力电子设备,对输出电压控制系统需同时实现两个目标:高动态响应和高稳态波形精度。诸如PID、双闭环PID、状态反馈等控制方案,虽然能实现高动态特性,但是不能满足高质量的稳态波形。本文利采用双闭环PI和重复控制相结合的控制方案,首先用双闭环PI控制算法,得到高动态特性的三相交流电,不过不能满足高质量的稳态波形,因为用电压质量要求比较高的非线性负载———镇流器是电感式的钠灯作为三相逆变器的负载时,钠灯不能稳定的工作(会高频率地闪烁),针对这一问题,在双闭环PI的基础上加重复控制补偿,建立MATLAB 仿真,并在双DSP+FPGA 硬件架构中高效精确的实现。实验结果表明,加上重复控制补偿后,钠灯能够稳定的工作,三相逆变器的稳态性能得到了很大的改善。1 三相逆变器数学模型的建立三相LC逆变器的主电路拓扑如图1,组成部分主要有三相逆变桥、三相滤波电感L、三相滤波电容C 。
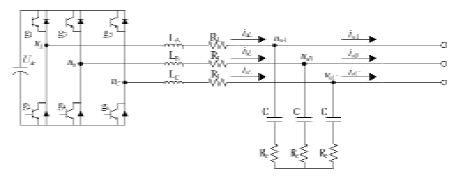
图1 LC 三相逆变器的主电路拓扑
定义三相逆变器负载侧输出电压为uoA、uoB、uoC,输出电流为ioA、ioB、ioC,三相逆变器电感L 侧输入电压为uA、uB、uC,输出电压为uoA、uoB、uoC,流过电感的电流为iaL、ibL、icL。以电感电流和输出电压为状态变量,建立在三相静止坐标系中的状态空间表达式如下。状态方程为:
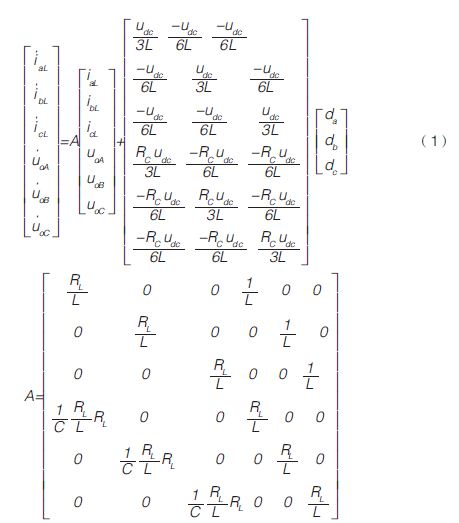
输出方程为:
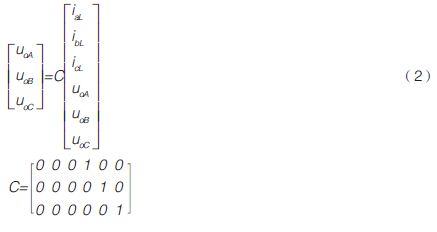
dk-调节器输出的调制信号。以上为三相逆变器的静止坐标系中的数学模型,下面讨论其解耦模型。引入如下三相静止坐标系到两相静止坐标系的变换关系式:
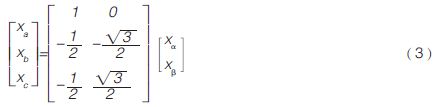
将式(3)代入式(1),即可得到在两相静止坐标系下控制对象的传递函数表达式如下:

从上面的控制对象的传递函数表达式可知,α轴和β轴已经完全解耦,各自等效为单相半桥逆变器。从上面的分析可以看到:①在两相静止坐标系下,三相逆变器是完全解耦的,可等效为两个单相半桥逆变器。②三相解耦后的模型与单相逆变器模型相同,所以三相逆变器的控制的分析与设计方法可以借鉴单相逆变器。
2 双闭环PI控制器的设计
2.1 电流环控制器的设计
控制系统的内环的控制对象是滤波电感,特点是频带宽、响应速度快,比例调节P即可以满足要求。另外,为了抵消结构电压负反馈的影加上输出电压正反馈:

在实践应用当中RL和RC很小,对系统的影响可以忽略不计,可得电流环控制框图如图2 所示:
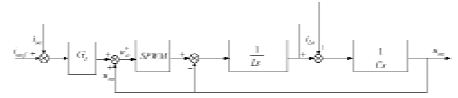
图2 三相逆变器控制系统电流环
得到电流环开环传递函数:

电流环的闭环传递函数:

(1)电流环比例调节器的设计步骤1)看开环传递函数的波特图是否满足要求;2)看闭环传递函数的波特图是否满足要求。
(2)设计电流环截止频率时,有2条执行准则1)从控制系统内外环分工考量,为了加快动态响应,电流环闭环截止频率要比外环的截止频率高且尽可能的高,并采用没有延时的比例调节;2)从控制系统的执行机构考量,电流内环闭环截止频率要比电力电子器件的开关频率低。三相逆变器的电感L=0.19mH,代入(8)式得到开环的幅频特性函数:

由上式可知0dB 时有ω=Gi/ L,由电流环截止住频率fc=2400Hz,可得Gi=2.86。2.2 电压环控制器的设计三相逆变器的外环采用电压负反馈,为了抵消结构电流负反馈影响,加上输出电流正反馈,可得:

三相逆变器的控制系统框图如图3。
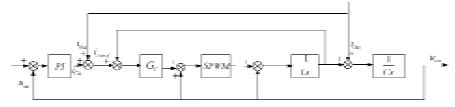
图3 三相逆变器控制系统电压环
电压环控制器的开环传递函数为:


,按照振荡指标法设计控制器参数,其中L=0.19mH,C=60μF,要求所得的开环伯德图如图4 所示。对于该控制系统,在闭环谐振峰值M最小的情况下,各变量相应的关系如下:
电压环设计的关键点是定中频宽h,根据在大量工程中的经验表明,中频区的宽度h通常在3到10这个范围内。再增大h的话对于降低M效果不明显。当中频宽确定后我们就可以算出:
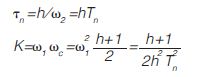
令h=5,可以算出kp=0.5089,ki=959。
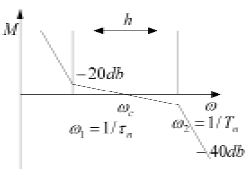
图4 电压环波特图
3 基于重复控制补偿的高精度PID控制
3.1 重复控制原理重复控制是日本的lnoue 于1981 年首先提出来的,其原理来源于内模原理,加到被控对象的输入信号除偏差信号外,还叠加了一个“过去的控制偏差”,该偏差时上一周期该时刻的控制偏差。把上一次运行时的偏差反映到现在,和“现在的偏差”一起加到被控对象进行控制,这种控制方式,偏差重复被使用,称为重复控制。经过几个周期的重复控制之后可以大大提高系统的跟踪精度,改善系统品质。重复控制中,一般期望重复控制作用在高频段的增益减小。为此,在重复控制中经常加入低通滤波器Q(s)。本控制方法取:

式中,Tq>0 为滤波器的时间常数。
3.2 重复控制补偿的PID控制基于重复控制补偿的PID控制系统框图如图5 所示,其中Q(s)为低通滤波器,urec为重复控制的输出,upid为PID控制的输出:

L=0.19mH,C=60μF,LC 滤波器的截止频率为1490Hz,设低通滤波器的截止频率为1500Hz,有Tq=0.00066,控制对象:

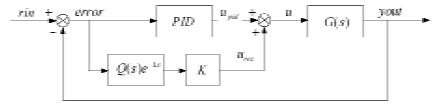
图5 重复控制补偿的PID 控制系统框图
3.3 重复控制补偿的PID控制仿真及其结果分析重复控制+双闭环PI在Simulink仿真中重复控制用的是Transport Delay模块,比例系数K取10,低通滤波器截至频率取1500Hz 即
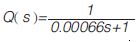
。得到如图6输入输出波形以及图7跟踪误差波形。
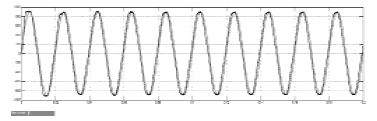
图6 重复控制+PID 位置跟踪
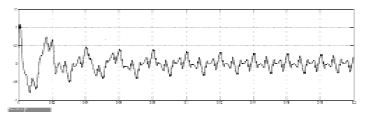
图7 跟踪误差
如图6,加上重复控制后从第3个周期开始输出信号yout跟能精确地跟踪输入信号rin,如图7,位置跟踪误差越来越小,在第4个周期误差不再减小。
4 双DSP+FPGA 三相逆变器的硬件设计双DSP+FPGA 控制系统功能如图8。
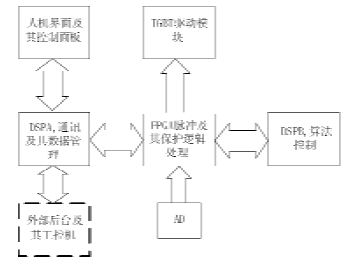
图8 双DSP+FPGA 控制系统功能
图8 为三相光伏逆变器的控制结构框图,逆变器的主控电路采用“双DSP+FPGA”结构,DSP 即数字信号处理器,采用Tl公司的TMS320F2812 芯片。FPGA 即现场可编程逻辑门阵列,采用XlLlNX公司的芯片。本设计采用的DSP芯片是一款定点型DSP,具有强大的数据运算能力,主频最高达150MHz,广泛应用于控制领域。FPGA具有强大的逻辑运算能力,能并行快速进行多组逻辑判断,根据DSP 和FPGA 的功能特点,作以下功能分配,两片DSP芯片分别为DSPA、DSPB。FPGA主要有四方面功能:一是控制AD 转换芯片,对外部CT/PT及调理电路后的电压电流信号进行模数转换并读取结果,同时把结果传送给DSPA 和DSPB; 二是作为DSPA和DSPB之间的数据交换通道;三是PWM 信号输出;四是进行故障检测及IO输出。DSPA主要负责与人机界面通讯及数据管理。DSPA读取FPGA 中的电压电流数据和故障状态等信息在人机界面中显示,以及传送人机界面中的命令。DSPB主要负责重复补偿控制+双闭环控制算法的实现,控制输出电压电流的稳定。5 实验结果及其分析THD是检验逆变器性能的一个重要指标,本文用THD和带电感式镇流器的钠灯能否正常工作来验证三相逆变器的性能。5.1 THD 实验结果
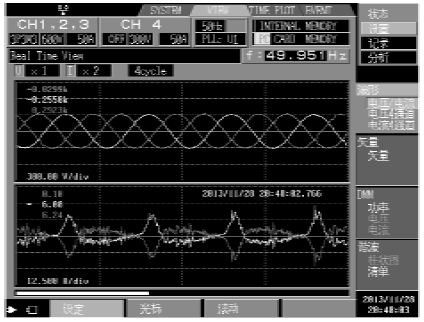
图9 双闭环PI 负载为钠灯的电压电流波形
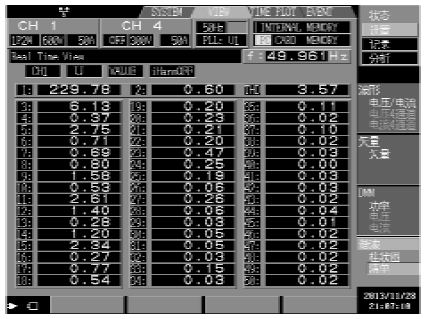
图10 双闭环PI 负载为钠灯的电压THD
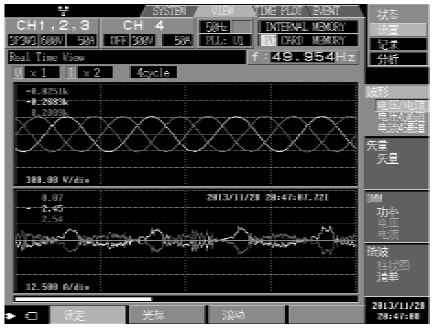
图11 双闭环PI+重复控制算法负载为钠灯的电压电流波形
如图9 为双闭环PI控制算法带钠灯的电压电流波形,图10 为双闭环PI 控制算法的电压THD。用双闭环PI控制带钠灯,电压的THD比较大,为3.57%,而且负载电流畸变比较严重。如图11 为在双闭环PI 基础上加上重复控制带钠灯的电压电流波形,如图12 为在双闭环PI基础上加上重复控制的电压THD。由图11、图12 可得结论:利用双闭环PI控制+重复控制带钠灯, 电压的THD比单纯用双闭环PI控制要小得多,为1.30%,而且负载电流畸变比较小。5.2 钠灯实验结果采用双闭环PI控制算法实现的三相逆变器,带钠灯时会不停地闪,钠灯不能稳定工作,当加上重复控制后,钠灯不会闪烁,能够稳定地工作。
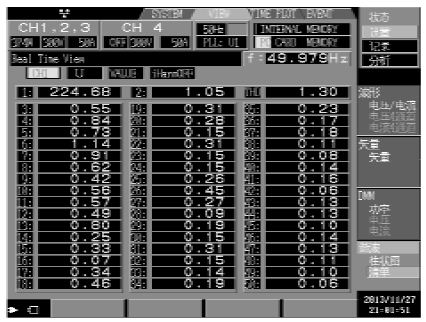
图12 双闭环PI+重复控制算法负载为钠灯的电压THD
图1 LC 三相逆变器的主电路拓扑
定义三相逆变器负载侧输出电压为uoA、uoB、uoC,输出电流为ioA、ioB、ioC,三相逆变器电感L 侧输入电压为uA、uB、uC,输出电压为uoA、uoB、uoC,流过电感的电流为iaL、ibL、icL。以电感电流和输出电压为状态变量,建立在三相静止坐标系中的状态空间表达式如下。状态方程为:
输出方程为:
dk-调节器输出的调制信号。以上为三相逆变器的静止坐标系中的数学模型,下面讨论其解耦模型。引入如下三相静止坐标系到两相静止坐标系的变换关系式:
将式(3)代入式(1),即可得到在两相静止坐标系下控制对象的传递函数表达式如下:
从上面的控制对象的传递函数表达式可知,α轴和β轴已经完全解耦,各自等效为单相半桥逆变器。从上面的分析可以看到:①在两相静止坐标系下,三相逆变器是完全解耦的,可等效为两个单相半桥逆变器。②三相解耦后的模型与单相逆变器模型相同,所以三相逆变器的控制的分析与设计方法可以借鉴单相逆变器。
2 双闭环PI控制器的设计
2.1 电流环控制器的设计
控制系统的内环的控制对象是滤波电感,特点是频带宽、响应速度快,比例调节P即可以满足要求。另外,为了抵消结构电压负反馈的影加上输出电压正反馈:
在实践应用当中RL和RC很小,对系统的影响可以忽略不计,可得电流环控制框图如图2 所示:
图2 三相逆变器控制系统电流环
得到电流环开环传递函数:
电流环的闭环传递函数:
(1)电流环比例调节器的设计步骤1)看开环传递函数的波特图是否满足要求;2)看闭环传递函数的波特图是否满足要求。
(2)设计电流环截止频率时,有2条执行准则1)从控制系统内外环分工考量,为了加快动态响应,电流环闭环截止频率要比外环的截止频率高且尽可能的高,并采用没有延时的比例调节;2)从控制系统的执行机构考量,电流内环闭环截止频率要比电力电子器件的开关频率低。三相逆变器的电感L=0.19mH,代入(8)式得到开环的幅频特性函数:
由上式可知0dB 时有ω=Gi/ L,由电流环截止住频率fc=2400Hz,可得Gi=2.86。2.2 电压环控制器的设计三相逆变器的外环采用电压负反馈,为了抵消结构电流负反馈影响,加上输出电流正反馈,可得:
三相逆变器的控制系统框图如图3。
图3 三相逆变器控制系统电压环
电压环控制器的开环传递函数为:
,按照振荡指标法设计控制器参数,其中L=0.19mH,C=60μF,要求所得的开环伯德图如图4 所示。对于该控制系统,在闭环谐振峰值M最小的情况下,各变量相应的关系如下:
电压环设计的关键点是定中频宽h,根据在大量工程中的经验表明,中频区的宽度h通常在3到10这个范围内。再增大h的话对于降低M效果不明显。当中频宽确定后我们就可以算出:
令h=5,可以算出kp=0.5089,ki=959。
图4 电压环波特图
3 基于重复控制补偿的高精度PID控制
3.1 重复控制原理重复控制是日本的lnoue 于1981 年首先提出来的,其原理来源于内模原理,加到被控对象的输入信号除偏差信号外,还叠加了一个“过去的控制偏差”,该偏差时上一周期该时刻的控制偏差。把上一次运行时的偏差反映到现在,和“现在的偏差”一起加到被控对象进行控制,这种控制方式,偏差重复被使用,称为重复控制。经过几个周期的重复控制之后可以大大提高系统的跟踪精度,改善系统品质。重复控制中,一般期望重复控制作用在高频段的增益减小。为此,在重复控制中经常加入低通滤波器Q(s)。本控制方法取:
式中,Tq>0 为滤波器的时间常数。
3.2 重复控制补偿的PID控制基于重复控制补偿的PID控制系统框图如图5 所示,其中Q(s)为低通滤波器,urec为重复控制的输出,upid为PID控制的输出:
L=0.19mH,C=60μF,LC 滤波器的截止频率为1490Hz,设低通滤波器的截止频率为1500Hz,有Tq=0.00066,控制对象:
图5 重复控制补偿的PID 控制系统框图
3.3 重复控制补偿的PID控制仿真及其结果分析重复控制+双闭环PI在Simulink仿真中重复控制用的是Transport Delay模块,比例系数K取10,低通滤波器截至频率取1500Hz 即
。得到如图6输入输出波形以及图7跟踪误差波形。
图6 重复控制+PID 位置跟踪
图7 跟踪误差
如图6,加上重复控制后从第3个周期开始输出信号yout跟能精确地跟踪输入信号rin,如图7,位置跟踪误差越来越小,在第4个周期误差不再减小。
4 双DSP+FPGA 三相逆变器的硬件设计双DSP+FPGA 控制系统功能如图8。
图8 双DSP+FPGA 控制系统功能
图8 为三相光伏逆变器的控制结构框图,逆变器的主控电路采用“双DSP+FPGA”结构,DSP 即数字信号处理器,采用Tl公司的TMS320F2812 芯片。FPGA 即现场可编程逻辑门阵列,采用XlLlNX公司的芯片。本设计采用的DSP芯片是一款定点型DSP,具有强大的数据运算能力,主频最高达150MHz,广泛应用于控制领域。FPGA具有强大的逻辑运算能力,能并行快速进行多组逻辑判断,根据DSP 和FPGA 的功能特点,作以下功能分配,两片DSP芯片分别为DSPA、DSPB。FPGA主要有四方面功能:一是控制AD 转换芯片,对外部CT/PT及调理电路后的电压电流信号进行模数转换并读取结果,同时把结果传送给DSPA 和DSPB; 二是作为DSPA和DSPB之间的数据交换通道;三是PWM 信号输出;四是进行故障检测及IO输出。DSPA主要负责与人机界面通讯及数据管理。DSPA读取FPGA 中的电压电流数据和故障状态等信息在人机界面中显示,以及传送人机界面中的命令。DSPB主要负责重复补偿控制+双闭环控制算法的实现,控制输出电压电流的稳定。5 实验结果及其分析THD是检验逆变器性能的一个重要指标,本文用THD和带电感式镇流器的钠灯能否正常工作来验证三相逆变器的性能。5.1 THD 实验结果
图9 双闭环PI 负载为钠灯的电压电流波形
图10 双闭环PI 负载为钠灯的电压THD
图11 双闭环PI+重复控制算法负载为钠灯的电压电流波形
如图9 为双闭环PI控制算法带钠灯的电压电流波形,图10 为双闭环PI 控制算法的电压THD。用双闭环PI控制带钠灯,电压的THD比较大,为3.57%,而且负载电流畸变比较严重。如图11 为在双闭环PI 基础上加上重复控制带钠灯的电压电流波形,如图12 为在双闭环PI基础上加上重复控制的电压THD。由图11、图12 可得结论:利用双闭环PI控制+重复控制带钠灯, 电压的THD比单纯用双闭环PI控制要小得多,为1.30%,而且负载电流畸变比较小。5.2 钠灯实验结果采用双闭环PI控制算法实现的三相逆变器,带钠灯时会不停地闪,钠灯不能稳定工作,当加上重复控制后,钠灯不会闪烁,能够稳定地工作。
图12 双闭环PI+重复控制算法负载为钠灯的电压THD
DSP FPGA 逆变器 电力电子 电压 电感 仿真 电路 电容 电流 电子 滤波器 低通滤波器 PWM 相关文章:
- 基于FPGA的片上系统的无线保密通信终端(02-16)
- 基于Virtex-5 FPGA设计Gbps无线通信基站(05-12)
- FPGA作为协处理器在实时系统中的应用(04-08)
- 学习FPGA绝佳网站推荐!!!(05-23)
- 我的FPGA学习历程(05-23)
- 基于Spartan-3A DSP的安全视频分析(05-01)