基于运算放大器驱动PIN二极管替代方案
时间:02-25
来源:互联网
点击:
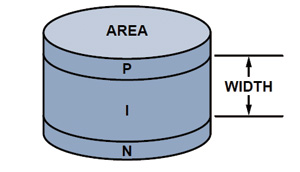
图1 PIN二极管
当PIN二极管正向偏置时,来自P材料的空穴和来自N材料的电子注入I区。电荷并不能立即完成重新合并;电荷重新合并所需的有限时间量称为“载流子生命周期”。这导致I区中存在净存储电荷,因而其电阻会降至某一个值,称为二极管的有效导通电阻RS(见图2a)。
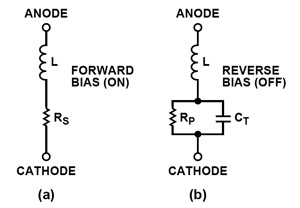
图2 PIN二极管等效电路:a) 导通,IBIAS 》》 0;b) 截止,VBIAS ≤ 0
当施加反向或零偏置电压时,二极管呈现为一个大电阻RP,它与电容CT并联(见图2b)。通过改变二极管几何结构,可以使PIN二极管具有不同的RS和CT组合,以满足各种电路应用和频率范围的需要。驱动器提供的稳态偏置电流ISS和反向电压共同决定RS和CT的最终值。图3和图4显示了典型PIN二极管系列——M/A-COM MADP 042XX8-13060系列硅二极管的参数关系。二极管材料会影响其特性。例如,砷化镓(GaAs)二极管几乎不需要反向偏置就能实现低CT值,如图9所示。
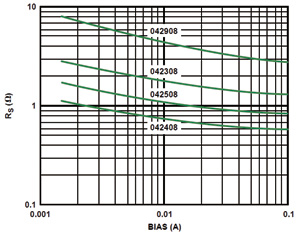
图3 硅二极管导通电阻与正向电流的关系

图4 硅二极管电容与反向电压的关系
PIN二极管中存储的电荷可以利用公式1进行近似计算。
(1)
其中,QS为存储的电荷;τ为二极管载流子生命周期;ISS为稳态电流。
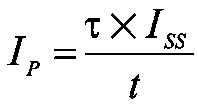
要导通或截止二极管,必须注入或移除所存储的电荷。驱动器的工作就是以极快的速度注入或移除所存储的电荷。如果开关时间小于二极管的载流子生命周期,则可以利用公式2近似计算实现快速开关所需的峰值电流(IP)。
(2)
其中:t为所需的开关时间;ISS 为驱动器所提供的稳态电流,用来设置PIN二极管导通电阻RS;τ为载流子生命周期。
驱动器注入或移除电流(或“尖峰电流”)i可以表示为公式3。
(3)
其中,C为驱动器输出电容(或“尖峰电容”)的值;V为输出电容上的电压;dv/dt为电容上的电压的时间变化率。
PIN二极管偏置接口
将开关驱动器控制电路与PIN二极管相连,以便通过施加正向或反向偏置来开关二极管,是一项具有挑战性的工作。偏置电路通常使用一个低通滤波器,位于RF电路与开关驱动器之间。图5显示了一个单刀双掷(SPDT)RF开关及其偏置电路。当设置妥当时,滤波器L1/C2和L3/C4允许将控制信号施加于PIN二极管D1–D4,控制信号与RF信号(从RF IN切换至PORT 1或PORT 2)的相互影响极少。这些元件允许频率相对较低的控制信号通过PIN二极管,但会阻止高频信号逃离RF信号路径。不正常的RF能量损耗意味着开关的插入损耗过高。电容C1、C3和C5阻止施加于二极管的直流偏置侵入RF信号路径中的电路。直流接地回路中的电感L2允许直流和低频开关驱动器信号轻松通过,但对于RF和微波频率则会呈现高阻抗,从而降低RF信号损耗。
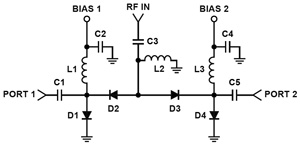
图5 典型单刀双掷(SPDT)RF开关电路
偏置电路、RF电路和开关驱动器电路全都会发生交互影响彼此的性能,因此像所有设计一样,权衡考虑各种因素十分重要。例如,较大的C2和C4(》20pF)对RF性能有利,但对驱动器则是麻烦,因为大电容会导致上升沿和下降沿较慢。快速开关对大多数应用都有利;因此,为了实现最优驱动器性能,电容必须极小,但为了满足RF电路要求,电容又必须足够大。传统PIN二极管驱动器
PIN二极管驱动器有各种形状和尺寸。图6给出了一个可提供高开关速度的典型分立开关驱动器的原理图。这种驱动器既可以采用“片线”(混合)结构来实现,也可以采用“表贴”(SMT)器件来实现;前者非常昂贵,后者虽不昂贵,但需要的印刷电路板(PCB)面积多于混合结构。
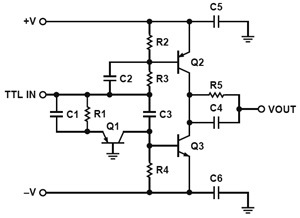
图6 分立开关驱动器电路
还有专用开关驱动器集成电路(IC)。这些IC十分紧凑,提供TTL接口,并具有良好的性能,但灵活性有限,而且往往很昂贵。还有一种开关驱动器架构应当考虑,即采用运算放大器。运算放大器开关驱动器的明显优势在于其自身的灵活性,可以轻松地对其进行配置,以适应不同的应用、电源电压和条件,为设计人员提供丰富的设计选项。
运算放大器PIN二极管驱动器
运算放大器电路是一种很有吸引力的PIN二极管驱动备选方案。除灵活性外,这种电路常常还能以接近或超过1000V/μs的跃迁速度工作。下面将介绍3种不同的RF PIN二极管放大器驱动电路。所选放大器虽然在根本特征上各不相同,但都能执行类似的功能。这些放大器电路可以驱动硅或砷化镓(GaAs)PIN二极管,但各有各的特点。
AD8037—钳位放大器
该电路能以最高10MHz的频率工作,具有出色的开关性能,总传播延迟为15ns。通过改变增益或钳位电压,可以调整输出电压和电流,以适应不同的应用。钳位放大器AD8037原本设计用于驱动ADC,可提供钳位输出以保护ADC输入不发生过驱。图7所示配置用一对AD8037(U2和U3)驱动PIN二极管。
电路 二极管 电流 电压 放大器 运算放大器 电阻 半导体 电子 电容 滤波器 电感 PCB 集成电路 ADC 相关文章:
- 电源设计小贴士 1:为您的电源选择正确的工作频率(12-25)
- 用于电压或电流调节的新调节器架构(07-19)
- 超低静态电流电源管理IC延长便携应用工作时间(04-14)
- 电源设计小贴士 2:驾驭噪声电源(01-01)
- 负载点降压稳压器及其稳定性检查方法(07-19)
- 电源设计小贴士 3:阻尼输入滤波器(第一部分)(01-16)