基于运算放大器驱动PIN二极管替代方案
时间:02-25
来源:互联网
点击:
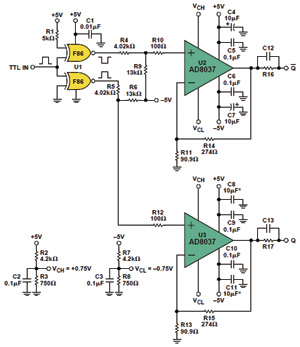
图7 AD8037 PIN二极管驱动器电路
本例中,U2和U3采用同相配置,增益为4。利用AD8037的独特输入钳位特性,可以实现极其干净和精确的钳位。它可以线性放大输入信号,最高可达增益乘以正负钳位电压(VCH和VCL)。当增益为4且钳位电压为±0.75V时,如果输入电压小于±0.75 V,则输出电压等于输入电压的4倍;如果输入电压大于±0.75V,则输出电压钳位在最大值±3V。这一钳位特性使得过驱恢复非常快(典型值小于2ns)。钳位电压(VCH和VCL)由分压器R2、R3、R7和R8确定。数字接口由74F86 XOR逻辑门(U1)实现,它提供U2和U3所用的驱动信号,两路互补输出之间的传播延迟偏斜极小。电阻网络R4、R5、R6和R9将TTL输出电平转换为大约±1.2V,然后通过R10和R12馈送给U2和U3。
U2和U3的±1.2-V输入提供60%过驱,以确保输出会进入钳位状态(4×0.75V)。因此,硅PIN二极管驱动器的输出电平设为±3V。电阻R16和R17限制稳态电流。电容C12和C13设置PIN二极管的尖峰电流。
AD8137—差分放大器
差分放大器(本例所用的AD8137)可以低成本提供出色的高速开关性能,并使设计人员能够十分灵活地驱动各种类型的RF负载。有各种各样的差分放大器可供使用,包括速度更快、性能更高的一些器件。
高速差分放大器AD8137通常用于驱动ADC,但也可以用作低成本、低功耗PIN二极管驱动器。其典型开关时间为7~11ns,其中包括驱动器和RF负载的传播延迟。它提供互补输出,功能多样,可以替代昂贵的传统驱动器。
图8所示电路将单端TTL输入(0~3.5V)转换为互补±3.5V信号,同时可使传播延迟最小。TTL信号放大4倍,在AD8137输出端产生所需的±3.5V摆幅。TTL信号的中点(或共模电压)为1.75V;必须将同样的电压施加于R2,作为参考电压VREF,以免在放大器输出端引入共模失调误差。最好从一个低源阻抗驱动此点;任何串联阻抗都会增加到R1上,从而影响放大器增益。
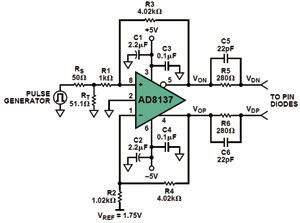
图8 PIN二极管驱动器原理图
输出电压增益可由公式4计算:
(4)
为正确端接脉冲发生器的输入阻抗,使之为50Ω,需要确定差分放大器电路的输入阻抗。这可以利用公式5计算,得出RT=51.55Ω,与之最接近的标准1%电阻值为51.1Ω。对于对称的输出摆幅,两个输入网络的阻抗必须相同。这意味着,反相输入阻抗必须将信号源的阻抗和端接电阻纳入增益设置电阻R2。
(5)
图8中,R2约比R1大20Ω,以补偿源电阻RS与端接电阻RT的并联组合所引入的额外电阻(25Ω)。将R4设为1.02kΩ(最接近1.025kΩ的标准电阻值),以确保两个电阻比相等,避免引入共模误差。
输出电平转换很容易利用AD8137的VOCM引脚来实现,该引脚设置直流输出共模电平。本例中,VOCM引脚接地,以提供关于地的对称输出摆幅。
电阻R5和R6设置稳态PIN二极管电流见公式6。
(6)
电容C5和C6设置尖峰电流,该电流有助于注入和移除PIN二极管中存储的电荷。可以根据特定二极管负载要求,调整这些电容的值,实现性能优化。尖峰电流可以由公式7计算。
(7)
ADA4858-3—内置电荷泵的三通道运算放大器
许多应用只提供一个电源,这常常令电路设计人员感到为难,尤其是当需要在PIN电路中提供低关断电容时。这种情况下,硅或GaAs PIN二极管驱动电路可以使用片上集成电荷泵的运算放大器,而不需要外部负电源;其好处是可以显著节省空间、功耗和预算。
高速电流反馈型三通道放大器ADA4858-3就是这样一种器件,它具有出色的特性,片上集成电荷泵,输出摆幅可以达到地电压以下3~1.8V(具体取决于电源电压和负载)。该器件鲁棒性很好,可以真正为其他电路提供最高50mA的负电源电流。
ADA4858-3为单电源系统中的互补PIN二极管微波开关驱动问题提供了一种独特的解决方案。回顾图4,从中可以看出:即使很少量的反向偏置也有助于降低二极管电容CT,具体取决于PIN二极管的类型。此类驱动器对GaAs PIN二极管很有利,因为这种二极管通常不需要很大的负偏置就能使关断电容(CT)保持较小的值(见图9)。
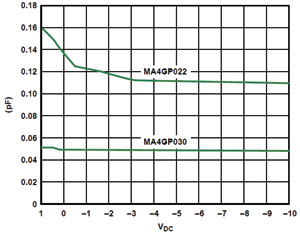
图9 GaAs CT电容与电压的关系
图10所示电路用ADA4858-3作为PIN二极管驱动器。可以在输入端增加一个缓冲门,使该电路兼容TTL或其他逻辑。对此电路的要求是将TTL 0V至3.5V输入信号摆幅转换为互补–1.5~+3.5V摆幅,用于驱动PIN二极管。
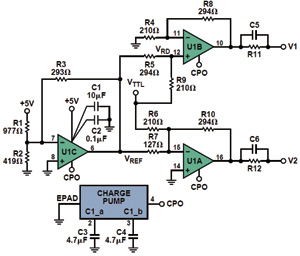
图10 ADA4858-3用作PIN二极管驱动器R1、R2、R3和U1C形成该电路的–1.5V基准电压,内部负电压CPO由片内电荷泵产生。电容C3和C4是电荷泵工作所必需的。负基准电压随后通过分压器
电路 二极管 电流 电压 放大器 运算放大器 电阻 半导体 电子 电容 滤波器 电感 PCB 集成电路 ADC 相关文章:
- 电源设计小贴士 1:为您的电源选择正确的工作频率(12-25)
- 用于电压或电流调节的新调节器架构(07-19)
- 超低静态电流电源管理IC延长便携应用工作时间(04-14)
- 电源设计小贴士 2:驾驭噪声电源(01-01)
- 负载点降压稳压器及其稳定性检查方法(07-19)
- 电源设计小贴士 3:阻尼输入滤波器(第一部分)(01-16)