光学雷达(LiDAR)在无人驾驶技术中的应用
时间:05-17
来源:互联网
点击:
基于点云的定位
首先介绍定位的重要性。很多人都有这样的疑问:如果有了精准的GPS,不就知道了当前的位置,还需要定位吗?其实不然。目前高精度的军用差分GPS在静态的时候确实可以在“理想”的环境下达到厘米级的精度。这里的“理想”环境是指大气中没有过多的悬浮介质而且测量时GPS有较强的接收信号。然而无人车是在复杂的动态环境中行驶,尤其在大城市中,由于各种高大建筑物的阻拦,GPS多路径反射(Multi-Path)的问题会更加明显。这样得到的GPS定位信息很容易就有几十厘米甚至几米的误差。对于在有限宽度上高速行驶的汽车来说,这样的误差很有可能导致交通事故。因此必须要有GPS之外的手段来增强无人车定位的精度。
上文提到过,LiDAR会在车辆行驶的过程中不断收集点云来了解周围的环境。我们可以很自然想到利用这些环境信息来定位。这里我们可以把这个问题用一个简化的概率问题来表示:已知t0时刻的GPS信息,t0时刻的点云信息,以及t1时刻无人车可能所在的三个位置:P1、P2和P3(这里为了简化问题,假设无人车会在这三个位置中的某一个)。求t1时刻车在这三点的概率。根据贝叶斯法则,无人车的定位问题可以简化为如下概率公式:

图片描述
右侧第一项表示给定当前位置,观测到点云信息的概率分布。其计算方式一般分局部估计和全局估计两种。局部估计较简单的做法就是通过当前时刻点云和上一时刻点云的匹配,借助几何推导,可以估计出无人车在当前位置的可能性。全局估计就是利用当前时刻的点云和上面提到过的高清地图做匹配,可以得到当前车相对地图上某一位置的可能性。在实际中一般会两种定位方法结合使用。右侧第二项表示对当前位置预测的概率分布,这里可以简单的用GPS给出的位置信息作为预测。通过计算P1、P2和P3这三个点的后验概率,就可以估算出无人车在哪一个位置的可能性最高。通过对两个概率分布的相乘,可以很大程度上提高无人车定位的准确度,如图3所示。
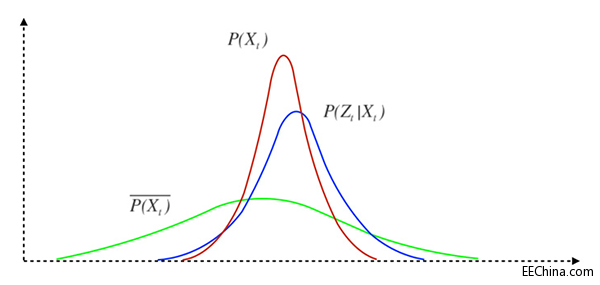
图3 基于点云的定位
障碍物检测
众所周知,在机器视觉中一个比较难解决的问题就是判断物体的远近,基于单一摄像头所抓取的2D图像无法得到准确的距离信息。而基于多摄像头生成深度图的方法又需要很大的计算量,不能很好地满足无人车在实时性上的要求。另一个棘手的问题就是光学摄像头受光照条件的影响巨大,物体的识别准确度很不稳定。图4展示了光线不好的情况下图像特征匹配的问题:由于相机曝光不充分,左侧图中的特征点在右侧图中没有匹配成功。图5左侧展示了2D物体特征匹配成功的例子:啤酒瓶的模板可以在2D图像中成功识别。但是如果将镜头拉远,如图5右所示,我们只能识别出右侧的啤酒瓶只是附着在另一个3D物体的表面而已。2D物体由于维度缺失的问题很难在这个情境下做出正确的识别。

图4 暗光条件下图像特征匹配的挑战

图5 2D图像识别的问题
利用LiDAR所生成的点云可以很大程度上解决上述两个问题,借助LiDAR的特性,我们可以对反射障碍物的远近、高低甚至是表面形状有较为准确的估计,从而大大提高障碍物检测的准确度,而且这种方法在算法的复杂度上低于基于摄像头的视觉算法,因此更能满足无人车的实时性需求。
LiDAR技术面临的挑战
前文我们专注于LiDAR对无人驾驶系统的帮助,但是在实际应用中,LiDAR也面临着许多挑战,包括技术、计算性能以及价格挑战。要想把无人车系统产品化,我们必须解决这些问题。
技术挑战:空气中悬浮物
LiDAR的精度也会受到天气的影响。空气中悬浮物会对光速产生影响。大雾及雨天都会影响LiDAR的精度,如图6所示。
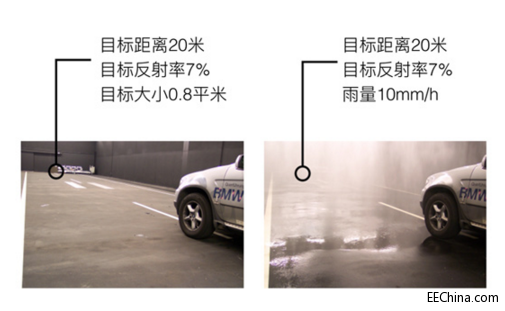
图6 外部环境对LiDAR测量的影响
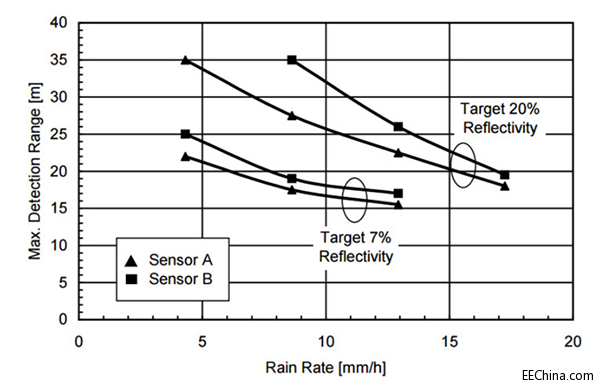
图7 雨量对LiDAR测量影响的量化
图7测试中使用了A和B两个来自不同制造厂的LiDAR,可以看到随着实验雨量的增大,两种LiDAR的最远探测距离都线性下降。雨中或雾中的传播特性最近几年随着激光技术的广泛应用越来越受到学术界的重视。研究表明:雨和雾都是由小水滴构成的,雨滴的半径直接和其在空中的分布密度直接决定了激光在传播的过程中与之相撞的概率。相撞概率越高,激光的传播速度受影响越大。
计算性能挑战:计算量大
从表1可以看到,即使是16线的LiDAR每秒钟要处理的点也达到了30万。要保证无人车定位算法和障碍物检测算法的实时性,如此大量的数据处理是面临的一大挑战。例如,之前所说的LiDAR给出的原始数据只是反射物体的距离信息,需要对所有产生的点进行几何变换,将其转化为位置坐标,这其中至少涉及4次浮点运算和3次三角函数运算,而且点云在后期的处理中还有大量坐标系转换等更复杂的运算,这些都对计算资源 (CPU、GPU、FPGA) 提出了很大的需求。

首先介绍定位的重要性。很多人都有这样的疑问:如果有了精准的GPS,不就知道了当前的位置,还需要定位吗?其实不然。目前高精度的军用差分GPS在静态的时候确实可以在“理想”的环境下达到厘米级的精度。这里的“理想”环境是指大气中没有过多的悬浮介质而且测量时GPS有较强的接收信号。然而无人车是在复杂的动态环境中行驶,尤其在大城市中,由于各种高大建筑物的阻拦,GPS多路径反射(Multi-Path)的问题会更加明显。这样得到的GPS定位信息很容易就有几十厘米甚至几米的误差。对于在有限宽度上高速行驶的汽车来说,这样的误差很有可能导致交通事故。因此必须要有GPS之外的手段来增强无人车定位的精度。
上文提到过,LiDAR会在车辆行驶的过程中不断收集点云来了解周围的环境。我们可以很自然想到利用这些环境信息来定位。这里我们可以把这个问题用一个简化的概率问题来表示:已知t0时刻的GPS信息,t0时刻的点云信息,以及t1时刻无人车可能所在的三个位置:P1、P2和P3(这里为了简化问题,假设无人车会在这三个位置中的某一个)。求t1时刻车在这三点的概率。根据贝叶斯法则,无人车的定位问题可以简化为如下概率公式:
图片描述
右侧第一项表示给定当前位置,观测到点云信息的概率分布。其计算方式一般分局部估计和全局估计两种。局部估计较简单的做法就是通过当前时刻点云和上一时刻点云的匹配,借助几何推导,可以估计出无人车在当前位置的可能性。全局估计就是利用当前时刻的点云和上面提到过的高清地图做匹配,可以得到当前车相对地图上某一位置的可能性。在实际中一般会两种定位方法结合使用。右侧第二项表示对当前位置预测的概率分布,这里可以简单的用GPS给出的位置信息作为预测。通过计算P1、P2和P3这三个点的后验概率,就可以估算出无人车在哪一个位置的可能性最高。通过对两个概率分布的相乘,可以很大程度上提高无人车定位的准确度,如图3所示。
图3 基于点云的定位
障碍物检测
众所周知,在机器视觉中一个比较难解决的问题就是判断物体的远近,基于单一摄像头所抓取的2D图像无法得到准确的距离信息。而基于多摄像头生成深度图的方法又需要很大的计算量,不能很好地满足无人车在实时性上的要求。另一个棘手的问题就是光学摄像头受光照条件的影响巨大,物体的识别准确度很不稳定。图4展示了光线不好的情况下图像特征匹配的问题:由于相机曝光不充分,左侧图中的特征点在右侧图中没有匹配成功。图5左侧展示了2D物体特征匹配成功的例子:啤酒瓶的模板可以在2D图像中成功识别。但是如果将镜头拉远,如图5右所示,我们只能识别出右侧的啤酒瓶只是附着在另一个3D物体的表面而已。2D物体由于维度缺失的问题很难在这个情境下做出正确的识别。
图4 暗光条件下图像特征匹配的挑战
图5 2D图像识别的问题
利用LiDAR所生成的点云可以很大程度上解决上述两个问题,借助LiDAR的特性,我们可以对反射障碍物的远近、高低甚至是表面形状有较为准确的估计,从而大大提高障碍物检测的准确度,而且这种方法在算法的复杂度上低于基于摄像头的视觉算法,因此更能满足无人车的实时性需求。
LiDAR技术面临的挑战
前文我们专注于LiDAR对无人驾驶系统的帮助,但是在实际应用中,LiDAR也面临着许多挑战,包括技术、计算性能以及价格挑战。要想把无人车系统产品化,我们必须解决这些问题。
技术挑战:空气中悬浮物
LiDAR的精度也会受到天气的影响。空气中悬浮物会对光速产生影响。大雾及雨天都会影响LiDAR的精度,如图6所示。
图6 外部环境对LiDAR测量的影响
图7 雨量对LiDAR测量影响的量化
图7测试中使用了A和B两个来自不同制造厂的LiDAR,可以看到随着实验雨量的增大,两种LiDAR的最远探测距离都线性下降。雨中或雾中的传播特性最近几年随着激光技术的广泛应用越来越受到学术界的重视。研究表明:雨和雾都是由小水滴构成的,雨滴的半径直接和其在空中的分布密度直接决定了激光在传播的过程中与之相撞的概率。相撞概率越高,激光的传播速度受影响越大。
计算性能挑战:计算量大
从表1可以看到,即使是16线的LiDAR每秒钟要处理的点也达到了30万。要保证无人车定位算法和障碍物检测算法的实时性,如此大量的数据处理是面临的一大挑战。例如,之前所说的LiDAR给出的原始数据只是反射物体的距离信息,需要对所有产生的点进行几何变换,将其转化为位置坐标,这其中至少涉及4次浮点运算和3次三角函数运算,而且点云在后期的处理中还有大量坐标系转换等更复杂的运算,这些都对计算资源 (CPU、GPU、FPGA) 提出了很大的需求。
- 另类传感器观念:汽车传感器(2)(11-30)
- 满足汽车高温应用环境要求的传感器接口IC(01-10)
- 构建可靠的容性传感器汽车开关和控制接口(01-06)
- 汽车HVAC系统中的传感器(02-23)
- 新技术、新应用让传感器深入汽车电子设备的各个角落(05-11)
- 汽油发动机的传感器全面介绍(05-19)