基于AVR的智能教学无人车控制系统设计
时间:11-10
来源:互联网
点击:
2.2.4语音模块
语音模块由WT588D语音芯片和SPI寻址的8M ROM芯片及其外围电路组成。使用前将需要播放的语音烧写在ROM芯片中。语音模块使用三线串口控制模式,这种控制模式由CS,DATA,CLK 3条通信线组成,分别连接到Atmega128的PC0、PC1、PC2 3个I/O口。控制时序根据标准SPI通信方式。
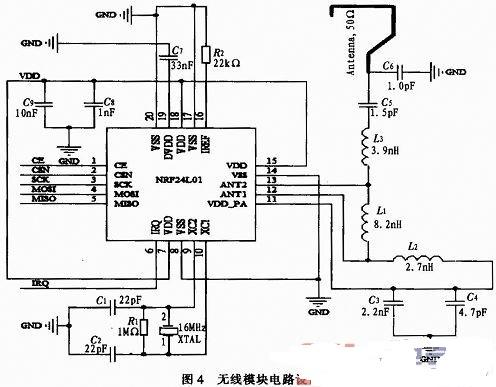
2.2.5无线模块
无线模块主要包括NRF24L01和Atmega128.NRF24L01采用FSK调制,内部集成NORDIC公司自家的Enhanced Short Burst协议,可实现点对点或是1对6的无线通信,无线通信速度可达2.4 Gbps,并可以通过配置其寄存器实现调频传输。主控芯片通过SPI协议配置NRF24L01的相关寄存器来完成对无线模块的初始化和数据的传输。无线模块的SPI信号线对应的接到Atmega128的PB0-PB3 4个I/O口上,CE端接到PE2,利用Atmega128内部集成的SPI功能进行通信。无线模块电路设计如图4所示。
3软件设计
软件设计包括控制端软件的设计和终端软件的设计。
3.1控制端软件设计
无人车控制台的主控软件将键盘指令转化为控制码发往下位机,控制小车的动作并显示下位机发来的状态信息。该软件利用Labview串口通讯将键盘指令转化为二进制字符串送到上位机。利用模拟SPI的方式,通过STC12LESA60S2配置NRF24L01的寄存器使其处于发射模式。当收到PC串口发送的数据时,NRF24L01在单片机的控制下将数据逐位发出。设计的控制端软件如图5所示。
3.2终端软件设计
教学无人车的终端软件主要包括无线接收程序、驱动控制程序等。程序中定义变量Life为生命值标识,定义Date为小车的控制标识,定义函数Motor()为电机控制函数。流程图如图6所示,主要分为以下步骤:
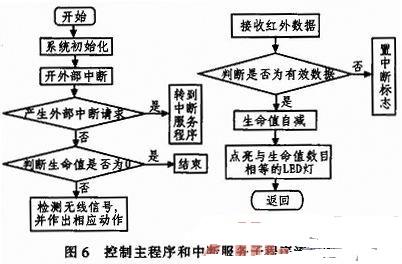
1)小车启动后,首先初始化各I/O口、系统中断、SPI接口以及NRF24L01的相关寄存器。小车的无线模块配置为接收模式。
2)下位机接收到无线信号后会产生一个中断,将数据通过SPI送到Atmega128中。在控制程序中,用多分支选择结构switch—case判断Date的值,通过调用Motor()函数控制电机做出相应动作。
3)接收到红外信号时,经判断若为有效信号,则使生命值标识Life减一。同时判断当前的Life值,设置PA口的值控制LED灯(生命值)的显示。
4结束语
文中进行了一种基于Atmega128单片机和无线通信的无人车控制系统设计。实验结果表明,教学无人车在无障碍区域无线通信有效传输距离可达80~100米,利用车载摄像头可以实时获取无人车所处环境信息,实现远程监控。其创新点是采用了PC控制模式和单兵运行模式两种方式对无人车进行控制,极大地增强了无人车的功能性和环境适应能力。在实际对抗演练中,无人车在遇到干扰的情况下顺利完成货物运输、环境勘探、反击敌方车辆等功能,取得了良好的控制效果。该设计可广泛应用于短途货运客运、应急救援、恶劣环境下自动作业等领域。
语音模块由WT588D语音芯片和SPI寻址的8M ROM芯片及其外围电路组成。使用前将需要播放的语音烧写在ROM芯片中。语音模块使用三线串口控制模式,这种控制模式由CS,DATA,CLK 3条通信线组成,分别连接到Atmega128的PC0、PC1、PC2 3个I/O口。控制时序根据标准SPI通信方式。
2.2.5无线模块
无线模块主要包括NRF24L01和Atmega128.NRF24L01采用FSK调制,内部集成NORDIC公司自家的Enhanced Short Burst协议,可实现点对点或是1对6的无线通信,无线通信速度可达2.4 Gbps,并可以通过配置其寄存器实现调频传输。主控芯片通过SPI协议配置NRF24L01的相关寄存器来完成对无线模块的初始化和数据的传输。无线模块的SPI信号线对应的接到Atmega128的PB0-PB3 4个I/O口上,CE端接到PE2,利用Atmega128内部集成的SPI功能进行通信。无线模块电路设计如图4所示。
3软件设计
软件设计包括控制端软件的设计和终端软件的设计。
3.1控制端软件设计
无人车控制台的主控软件将键盘指令转化为控制码发往下位机,控制小车的动作并显示下位机发来的状态信息。该软件利用Labview串口通讯将键盘指令转化为二进制字符串送到上位机。利用模拟SPI的方式,通过STC12LESA60S2配置NRF24L01的寄存器使其处于发射模式。当收到PC串口发送的数据时,NRF24L01在单片机的控制下将数据逐位发出。设计的控制端软件如图5所示。
3.2终端软件设计
教学无人车的终端软件主要包括无线接收程序、驱动控制程序等。程序中定义变量Life为生命值标识,定义Date为小车的控制标识,定义函数Motor()为电机控制函数。流程图如图6所示,主要分为以下步骤:
1)小车启动后,首先初始化各I/O口、系统中断、SPI接口以及NRF24L01的相关寄存器。小车的无线模块配置为接收模式。
2)下位机接收到无线信号后会产生一个中断,将数据通过SPI送到Atmega128中。在控制程序中,用多分支选择结构switch—case判断Date的值,通过调用Motor()函数控制电机做出相应动作。
3)接收到红外信号时,经判断若为有效信号,则使生命值标识Life减一。同时判断当前的Life值,设置PA口的值控制LED灯(生命值)的显示。
4结束语
文中进行了一种基于Atmega128单片机和无线通信的无人车控制系统设计。实验结果表明,教学无人车在无障碍区域无线通信有效传输距离可达80~100米,利用车载摄像头可以实时获取无人车所处环境信息,实现远程监控。其创新点是采用了PC控制模式和单兵运行模式两种方式对无人车进行控制,极大地增强了无人车的功能性和环境适应能力。在实际对抗演练中,无人车在遇到干扰的情况下顺利完成货物运输、环境勘探、反击敌方车辆等功能,取得了良好的控制效果。该设计可广泛应用于短途货运客运、应急救援、恶劣环境下自动作业等领域。
单片机 机器人 USB PWM 红外 传感器 LED 电路 电路图 MCU 电源模块 AVR MIPS ADC 电压 电流 步进电机 三极管 霍尔传感器 电子 相关文章:
- 车载酒精探测控制仪设计(05-01)
- PIC16C72A单片机在汽车智能仪表中的应用(07-02)
- 基于MSP430行驶车辆检测器的设计(07-16)
- 基于单片机的汽车防碰撞报警系统设计(10-16)
- 基于16位单片机MC9S12DG128的智能车控制系统设计与实现(11-11)
- 基于单片机的倒车防撞预警系统设计和实现(11-21)