AFS系统步进电机控制和关键诊断
时间:12-24
来源:互联网
点击:
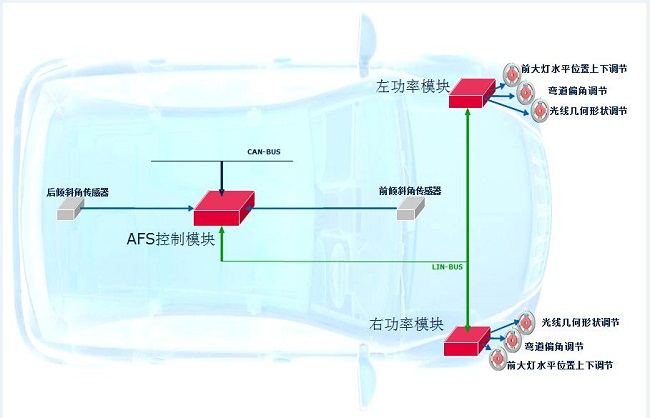
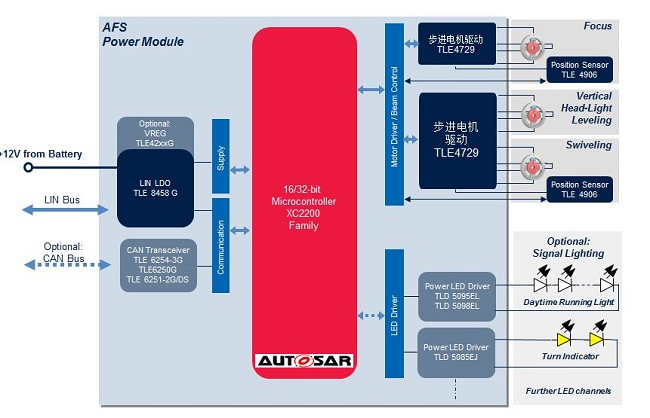
步进电机分为变磁阻(VR)、永磁(PM)和混合型(Hybrid)步进电机,在车用环境中,最常用的是永磁型步进电机,其转子是永磁体。在汽车应用环境中,也有许多场合需要用到步进电机,如AFS前大灯水平位置调节、弯道调节和光线几何形状调节,都需要用到步进电机作为执行器。图1是典型的AFS系统示意图。图2是英飞凌针对AFS应用的芯片组解决方案。
英飞凌作为领先的汽车半导体提供商,为解决汽车步进电机控制和驱动问题,研发了步进电机专用控制芯片TLE4729G。这颗控制器具有一系列优异的性能,被大多数零部件供应商在系统集成中采用。
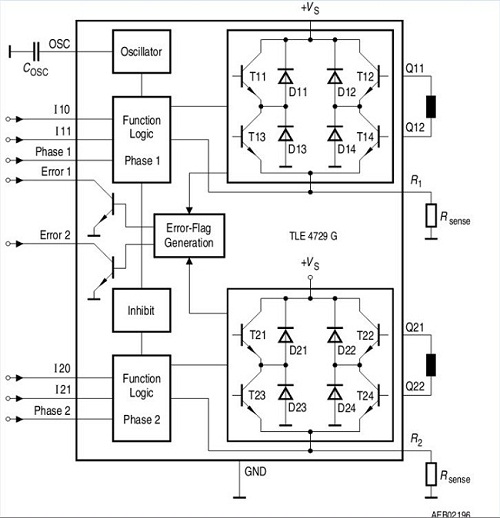
英飞凌在提供TLE4729G基本的数据手册之外还提供了多篇应用笔记以方便客户快速对系统进行设计,本文在评估板基础上对步进电机系统和诊断要点进行了阐述和说明,是对英飞凌步进电机控制技术支持的一个补充。TLE4729G用于控制、驱动两相步进电机的智能功率器件,其内部结构如图3所示。其中,与应用相关的重要端口说明如表1所示。

步进电机驱动原理和PWM调制
步进电机的运行方式包括全步、半步和微步运行三种方式。TLE4729G支持全步和半步运行这两种方式,支持微步运行方式将会很快面市。此处主要介绍步进电机全步和半步两种运行方式。
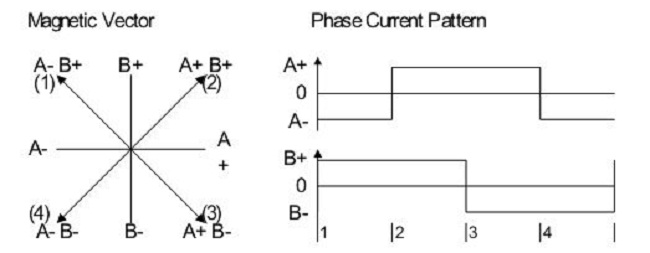
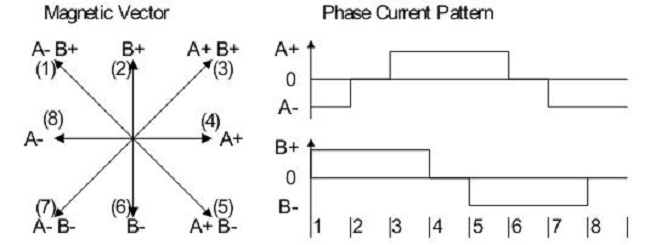
全步模式下,步进电机的两个绕组同时充磁,根据充磁电流的方向变化,分为四个状态,设A相绕组的正向电流为A+,则负向电流为A-,如图4所示为步进电机的四个状态1、2、3、4。
半步模式下,步进电机的两个绕组会出现四个额外的状态,其中一绕组充磁时,另外一绕组不充电,即没有电流通过。因此,在步进电机半步模式下有8个状态,如图5所示为步进电机的八个状态1、2、3、4、5、6、7、8。
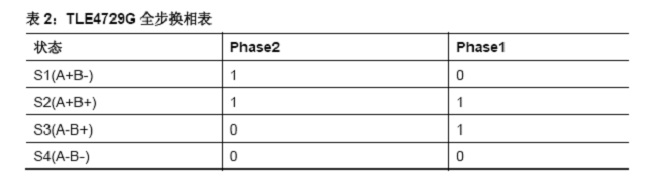
TLE4729G具有电流设置管脚,在全步模式下,两个半桥中流过的电流可以设为一样,不同的电流大小设置对应不同的电流运行模式:全速模式,额定模式,保持模式和零电流模式。在全步模式下,设定电流模式后,步进电机的换相只和Phase1和Phase2有关。具体时序参考图6,根据图6可以得出换相表,如表2所示。

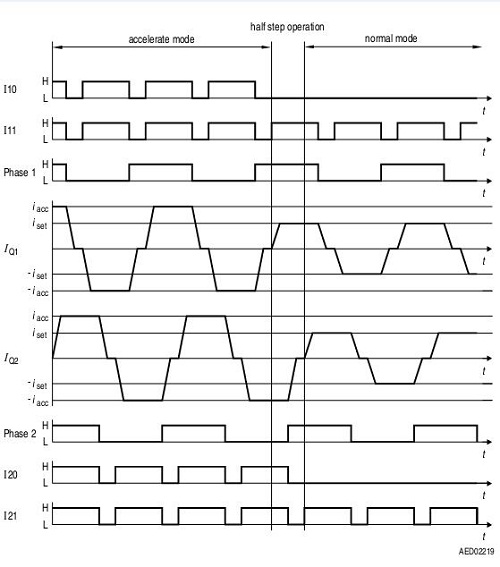
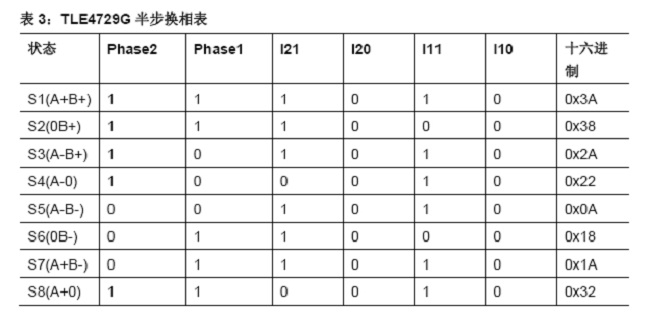
TLE4729G的控制方法为电流控制,在半步模式下,由于出现某项绕组零电流的情况,需要用到电流设置管脚构成换相表,和全步模式不一样的是在状态切换即换相过程中电流设置管脚的值是变化的。具体时序参考图7所示,根据该图可以得出半步换相表,如表3所示。
步进电机峰值电流控制原理和换相分析
由TLE4729G内部结构可以知道,其功率级输出为两个全桥,为了分析步进电机换向过程中的电流行为和峰值控制原理,取出其中一个全桥进行分析。图8是输出Q11 、Q12构成的全桥换相过程中的电流时序图,设Q11、Q12上的负载为步进电机绕组A。换相发生在Phase信号由低变高的时候,此时流过绕组A的电流方向改变。
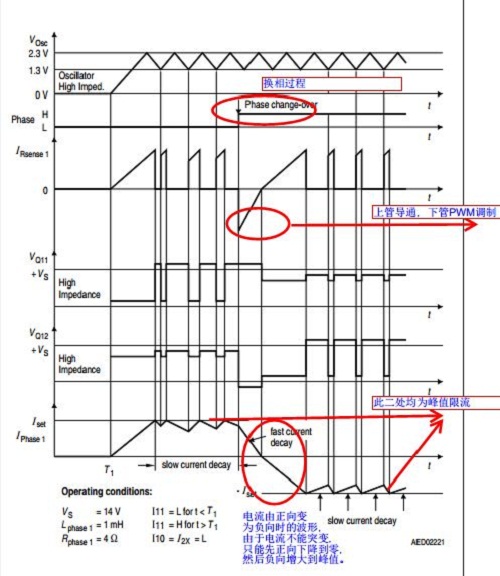
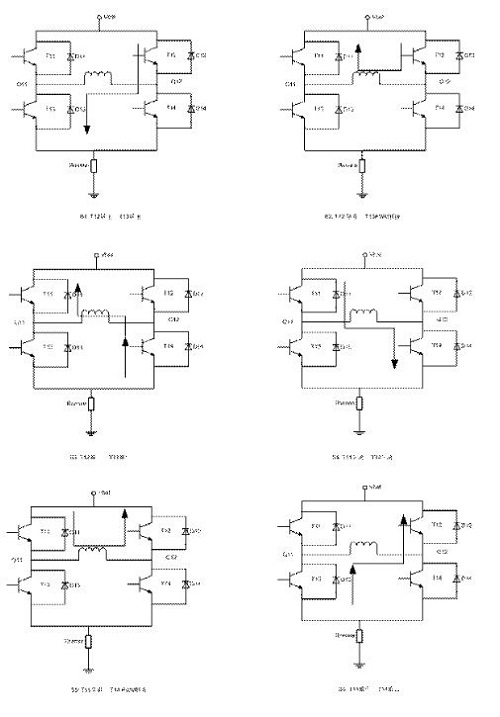
当Phase=L时,设此时的相电流为正,如图9所示,有三种开关状态S1、S2、S3三种状态,其中S1和S2是正常工作状态,S3是换相发生时的过渡状态;S1时T12和T13导通,电流流向为正,此时电感电流线性增加,采样电阻上有电流流过,当电感电流增加到Iset时,T13关断,此时电感电流线性下降,电流波形表现为三角波,这种限流方式称为峰值限流方式,这期间取样电阻上没有电流通过,T13工作在PWM斩波方式下;当换相命令发生即Phase=L变化为Phase=H时,T12和T13必须先关断,此时T11和T14尚未导通,电流方向仍未发生变化而是线性减小,通过D11和D14续流,这个时候流过取样电阻上的电流为负,故取样电压对地表现为负。
当Phase=H时,设此时的相电流为负,如图9所示,有三种开关状态S4、S5、S6三种状态,其中S4和S5是正常工作状态,S6是换相发生时的过渡状态;具体开关过程如图9所示,分析方法同上文,同样存在上管导通,下管PWM控制和二极管续流的过程。
诊断
诊断在汽车电子中必不可少,这是汽车安全性的必然要求。TL4729G支持过热、开路和短路诊断。客户在使用TLE4729G时碰到的大多数问题也集中在开路诊断上。TLE4729G的诊断表如表4所示。在全步模式下和半步模式下,由于换相的差异,导致了开路诊断信号有差异。在某些半步换相表下,甚至出现不能诊断的情况。
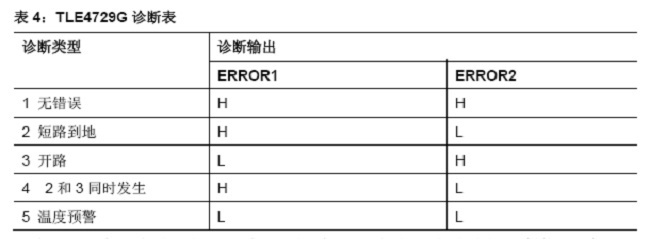
从表4可以看出,短路到地和开路错误同时发生时,诊断结果和短路到地是一样的,因此可以认为短路到地的优先级比开路错误高。
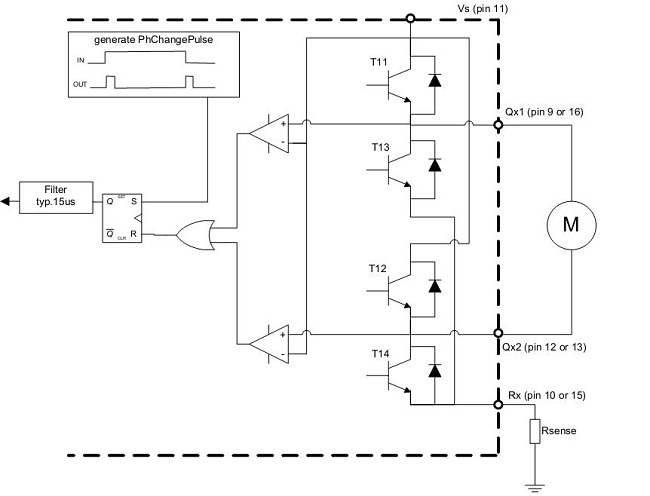
开路诊断的原理是利用感性负载续流的原理。如图10所示,一般来说,每次换相的时候,内部SR触发器置位,置位信号由换相信号决定,如图10左上所示,置位信号使得ERROR1为低电平。SR触发器的输出经过一个滤波环节(典型滤波时间为15μs)连接到ERROR1,如果感性负载是良好连接,即未开路的,在负载电流方向改变时,由于续流的作用,全桥两个输出中的一个电压为VS+VFU(VFU为续流二极管导通压降),比如图10中T14由导通到关断,T12尚未导通时,此时电流经过与T12并联的二极管续流,这时候Qx2的电压值为VS+VFU。全桥的两个输出分别送入到两个电压比较器的同相输入端,而这两个电压比较器的反相输入端则与电源VS相连,两个比较器的输出连接至一个或门的两个输入,与门的输出则连接到RS触发器的R管脚。所以换相过程由于有续流电压的存在使得或门的输出为1,使得RS触发器复位,一般而言换相过程持续时间远小于15μs,所以在正常模式下由于复位信号的作用使得ERROR1保持为高。当出现开路的时候,VS+VFU这个条件被破坏,RS触发器置位,15μs后ERROR1信号为低。
全步模式开路诊断
本例中采用XC800作为处理器,使用P3口作为TLE4729G的电流设置和换相口。定义如表5。

在全步模式下,电流设定和换相是分离的,所以可以用两个不同的函数来实现,分为为电流设定函数和换相函数,当然也可以统一到一个函数中,换相的时候对应电流管脚不发生变化即可。
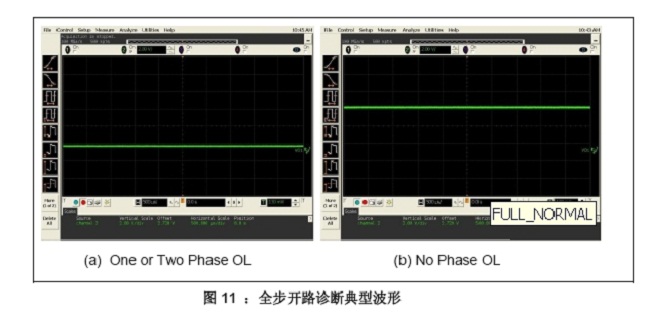
全步模式下的开路诊断容易实现,ERROR1指示开路情况,当未出现开路时,ERROR1为高电平,当出现开路时ERROR1为低电平,如图11所示。
半步模式开路诊断
半步开路诊断是TLE4729G中比较复杂的应用之一。有很多用户反映无法进行半步开路诊断。其实不然,如果深入分析半步换相表,便可得出可以稳定诊断开路诊断的真值表。
半步诊断的复杂性是由于TLE4729G的Inhibit模式导致的,开路可诊断的一个条件是电流设置管脚至少有一个为高电平,当某相两个电流设置管脚均为低时,该项为Inhibit模式,ERROR1在第一个续流周期复位。当有开路情况存在时,ERROR1的复位导致诊断信息丢失。由于半步的8个状态中多次出现Inhibit模式,所以导致了某些情况下开路诊断会有异常。从真值表角度分析,当某相有Inhibit模式出现,即该相两个电流管脚均为0时,对应的相位管脚可设置为1或者0,这样便可以得出多组半步换相表,不同的换相表在开路诊断时,结果也不一样。如表6中粗线所示,有四个状态S2,S4,S6,S8中的某相位设置信号是可变设置的,可为0或者1,从排列的角度上看有16种不同的真值表,这里取出6种典型表(A-F)举例说明开路诊断特点。
重新列出半步可变换相表,如表6所示。
管脚设置仍如全步模式,在实际程序中,使用数据建立换相表,如下所示。
//code motor_halfsteps[8]={0x3a, 0x28, 0x2a, 0x02,0x0a,0x18,0x1a,0x32}; //A 0,0,1,1
//code motor_halfsteps[8]={0x3a, 0x38, 0x2a, 0x22,0x0a,0x08,0x1a,0x12}; //B 1,1,0,0
//code motor_halfsteps[8]={0x3a, 0x28, 0x2a, 0x02,0x0a,0x08,0x1a,0x12}; //C All 0
//code motor_halfsteps[8]={0x3a, 0x38, 0x2a, 0x22,0x0a,0x18,0x1a,0x32}; //D All 1
code motor_halfsteps[8]={0x3a, 0x28, 0x2a, 0x22,0x0a,0x18,0x1a,0x32}; //E 0,1,1,1
//code motor_halfsteps[8]={0x3a, 0x28, 0x2a, 0x02,0x0a,0x08,0x1a,0x32}; //F 0 0 0 1
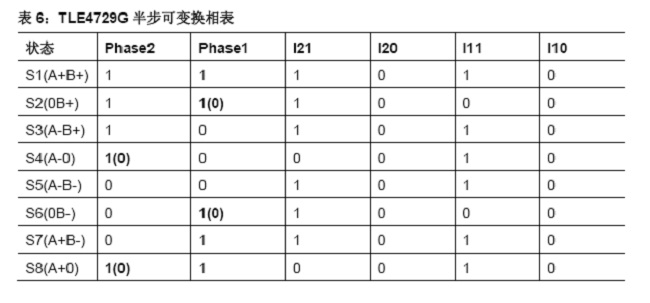
图12是真值表为A时ERROR1的波形,在该真值表下仅有一种波形,无法区分两相开路、一相开路和无开路的情况,所以无法完成开路OL诊断。
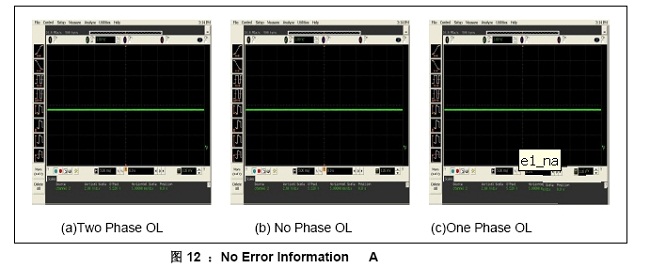
图13是真值表为B时 ERROR1的波形,在该真值表下可以稳定分析出一路开路、两路开路和无开路诊断。

图14是真值表为C、D时ERROR1的波形,在该真值表下可以分析出开路故障和无开路故障,但是不能分析出一路开路和两路开路故障,因为在一路开路有两种情况,即A相开路和B相开路,其中有一相开路和两相均开路的诊断波形一样,故不能做区分。
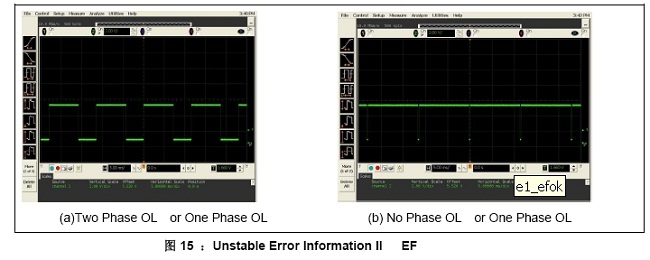
图15是真值表为E、F时ERROR1的波形,该真值表下有两种波形,但是由于存在无开路和一路开路故障是同一种波形情况,故不能完全分析出开路和无开路两种情况。
短路到负载和电源
短路到负载和电源在数据手册和应用笔记已经有完备的叙述,此处不再赘述。
EMC问题
EMC问题是客户实际使用TLE4729非常关注的问题。EMC设计需要考虑的是系统的开关频率和输出电容的问题,另外还有PCB布线也需要考究。
开关频率
TLE4729G的振荡频率是可以调整,在EMC测试的时候可以根据需要调整振荡频率。频率变化范围为18kHz~30kHz。调整的方法为改变外部振荡电容C,电容计算的方法是A = f * C,该公式未在数据手册中给出,但是在芯片设计时振荡频率是按此设计。其中A是常数,也就是说频率和电容成反比,A为55kHz.nF。根据数据手册,典型振荡频率25kHz时对应的电容为2.2nF,满足该公式。
TLE4729G另外一种调整方法是使用外部时钟同步的方法,TLE4729G内部有一个推挽式电流源,输出能力为120μA,这个电流源可以驱动振荡器产生锯齿波振荡信号。当使用外部时钟同步时,内部电流源失效,振荡器由外部振荡器驱动,驱动信号要求低电平介于0V~0.8V,高电平要求在3V~5V之间。
输出电容
除了在逻辑电源和功率电源处添加去耦电容保证供电电源的品质之外,为了降低功率输出的开关噪声和电磁辐射,可在四个功率输出管脚处对地接电容,可以有效降低电路EMI问题。
TLE4729G 评估板
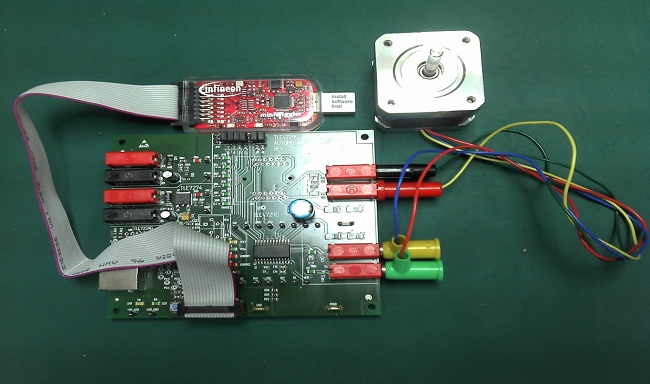
英飞凌提供TLE4729G的评估板,如图16所示,图中电机不包含在评估套件内。该评估板上位机是在NI的Labview环境开发,在某些操作系统中可能会遇到驱动问题而不能成功运行上位机软件。幸运的是,该评估板上有XC866的下载口,硬件工程师可以通过手工编程实现对TLE4729G的评估。本文使用的下载器是MiniWiggler,编程环境是keil uVision4。
步进电机 半导体 PWM 电流 电感 电阻 电压 二极管 汽车电子 比较器 EMC 电容 PCB 振荡器 电路 硬件工程师 相关文章:
- 单芯片集成电路优化自适应转向大灯系统设计(07-03)
- 汽车仪表步进电机控制算法的仿真(02-15)
- 灵活的现代CPLD汽车数字仪表板(06-04)
- 基于步进电机控制技术的汽车辅助照明随动系统设计(01-25)
- 基于步进电机驱动器MC33991的车速表设计(11-14)
- 基于CAN总线的一体化步进电机驱动器的设计与实现(11-25)