CAN总线在电动汽车充电机上的应用
时间:10-11
来源:互联网
点击:
1 引言
电动汽车(ev)是由电机驱动前进的,而电机的动力则是来自可循环充电的电池,并且电动汽车对电池的工作特性的要求远超过了传统的电池系统,因此电动汽车电池系统电压高而且电流大,所以对电动汽车充电机的要求比较高。
电动汽车充电机需要能够在以分钟计算的时间内完成对电池的充电,而不是通常的以小时来计算。以一个电池容量为30kwh的电动汽车蓄电池来计算,如果在15分钟内将它充满,那么充电功率将达到120kw,假设电动汽车的充电电压在200~400v,那么相应的他的充电电流将会达到300a。如此大的充电电流,如果仅用单一的电源模块很难实现。面对充电机的日益大容量化,并联均流是一个很好的解决方法。因为软件均流具有成本较低,扩容能力强,扩容方便,方案改变、升级容易实现等优点,所以在实现的过程中采用软件均流的方法,但是实现过程中需要解决的关键问题是模块间的通信问题。
can总线因为具有通信可靠性高,成本低,简单实用等优点得到了越来越多的应用[5],所以充电机内部模块间通信采用基于can总线的软件均流方案;电动汽车充电机需要和蓄电池管理系统(bms)之间通信,同时由于can总线还具有较高的网络安全性等特点,并且作为国际标准已逐渐发展成汽车电子系统的主流总线,因此将采用can总线作为充电机与电池管理系统之间的通信方式;而且can总线的通信距离较远(10km),同时可靠性较高,所以监控中心和充电机之间的通信也采用can通信的方式。
本文对can总线的研究将集中在如何将can总线应用在电动汽车充电机上,并完成充电机在工作过程中与蓄电池管理系统,内部电源模块以及监控中心的通信流程。
2 电动汽车充电机的通信拓扑
电动汽车充电机在工作的过程中,需要和车载电池管理系统(bms)、充电站的集中监控中心和充电机内部电源模块之间通信。
充电机主控制器与蓄电池管理系统(bms)之间的通信网络(can1):实现充电机与车载蓄电池管理系统的之间数据交换,为动力电池充电提供参数信息。
充电机主控制器与充电监控系统之间的通信网络(can2):实现监控中心与充电机的实时数据采集、监控和控制功能,能够实时的通过监控中心掌握充电机的工作状态,并能通过充电机间接获取蓄电池的信息。
充电机主控制器与电源模块之间的网络通信网络(can3):实现充电机主控制器与独立电源模块之间的数据交换,实现基于can总线的软件均流方案,其中n个电源模块作为工作模块,n个电源模块作为备用的电源模块。
can网络应用在电动汽车充电机上,主要是根据充电机的工作原理并结合can总线的工作特性,制定合适的基于can总线通信的工作流程图。
3 充电机与bms的can通信
3.1 can1通信
蓄电池与电池管理系统之间的通信流程图如图 2所示,在图2中将充电机的工作流程和电池管理系统的工作流程联系在了一起,并且通过can总线进行数据的传输。充电机与蓄电池之间通过can总线的数据传输主要包括以下几个部分:
(1)开始给蓄电池充电之前,bms首先和充电机建立联系,然后将电池的类型、容量、最大的充电允许电压电流等信息通过can总线发送给充电机。
(2)充电过程中,bms将电池的充电参数电压、电流、soc等信息定时(500ms)发送给充电机,为充电机改变充电策略、调整充电参数提供参考。
(3) 充电结束后,bms将充电完成的信息通过can总线发送给充电机,并切断和充电机之间的通信,完成充电。
3.2 can2通讯
充电机与充电监控系统的通信系统为一个独立的can网络,包括了监控计算机和若干台充电机。充电机与充电监控系统的通信网络在应用层应能实现以下功能:
(1) 监控计算机至充电机传送的数据:
l充电机开机
l充电机停机
l紧急停机
l充电机参数设置
l时间同步
(2) 充电机至监控计算机传送的数据:
l电压、电流、温度数据传输
l累计输入输出电量
l充电机故障代码
l充电时间
(3)监控计算机通过充电机读取蓄电池的数据:
l蓄电池的标识、类型及参数
l蓄电池电压数据
l蓄电池温度数据
l蓄电池soc数据
l蓄电池实时状态
3.3 can3通讯
充电机与电源模块之间的通信主要是为了实现充电机的软件并联均流功能,在工作的过程中需要传输的是充电过程中的电压电流等参数值,以及充电机的工作状态等信息。其工作流程包括了以下几个部分:
(1) 充电开始之前,电源模块初始化,检查工作状态,确定能否正常工作,设立允许或禁止充电标志位,并且将信息发送给主控制器;
(2) 充电机主控制器在得到电池信息,确定充电策略后,会选择适当的充电模块参与充电,并将充电的参数发送给电源模块;
(3) 在充电机主控制器确认需要的电源模块可以工作后,发出开始充电的指令,并采集充电的参数;
(4) 主控制器根据采集的数据实时改变充电策略,调整充电参数,并实时的监控模块的工作状态;
(5) 当发现充电过程中有电源模块发出报警信息后,立即启动备用模块,并将问题模块切除充电状态;
(6) 充电机的主控制器在综合充电状态信息后,做出停止充电的判断,并结束充电过程,恢复待机状态。
图4为充电机内部并联均流的工作流程图,将充电机主控制器和电源模块的详细工作流程做了规定,同时包括了can总线在其中的串联作用。
电动汽车(ev)是由电机驱动前进的,而电机的动力则是来自可循环充电的电池,并且电动汽车对电池的工作特性的要求远超过了传统的电池系统,因此电动汽车电池系统电压高而且电流大,所以对电动汽车充电机的要求比较高。
电动汽车充电机需要能够在以分钟计算的时间内完成对电池的充电,而不是通常的以小时来计算。以一个电池容量为30kwh的电动汽车蓄电池来计算,如果在15分钟内将它充满,那么充电功率将达到120kw,假设电动汽车的充电电压在200~400v,那么相应的他的充电电流将会达到300a。如此大的充电电流,如果仅用单一的电源模块很难实现。面对充电机的日益大容量化,并联均流是一个很好的解决方法。因为软件均流具有成本较低,扩容能力强,扩容方便,方案改变、升级容易实现等优点,所以在实现的过程中采用软件均流的方法,但是实现过程中需要解决的关键问题是模块间的通信问题。
can总线因为具有通信可靠性高,成本低,简单实用等优点得到了越来越多的应用[5],所以充电机内部模块间通信采用基于can总线的软件均流方案;电动汽车充电机需要和蓄电池管理系统(bms)之间通信,同时由于can总线还具有较高的网络安全性等特点,并且作为国际标准已逐渐发展成汽车电子系统的主流总线,因此将采用can总线作为充电机与电池管理系统之间的通信方式;而且can总线的通信距离较远(10km),同时可靠性较高,所以监控中心和充电机之间的通信也采用can通信的方式。
本文对can总线的研究将集中在如何将can总线应用在电动汽车充电机上,并完成充电机在工作过程中与蓄电池管理系统,内部电源模块以及监控中心的通信流程。
2 电动汽车充电机的通信拓扑
电动汽车充电机在工作的过程中,需要和车载电池管理系统(bms)、充电站的集中监控中心和充电机内部电源模块之间通信。

充电机主控制器与蓄电池管理系统(bms)之间的通信网络(can1):实现充电机与车载蓄电池管理系统的之间数据交换,为动力电池充电提供参数信息。
充电机主控制器与充电监控系统之间的通信网络(can2):实现监控中心与充电机的实时数据采集、监控和控制功能,能够实时的通过监控中心掌握充电机的工作状态,并能通过充电机间接获取蓄电池的信息。
充电机主控制器与电源模块之间的网络通信网络(can3):实现充电机主控制器与独立电源模块之间的数据交换,实现基于can总线的软件均流方案,其中n个电源模块作为工作模块,n个电源模块作为备用的电源模块。
can网络应用在电动汽车充电机上,主要是根据充电机的工作原理并结合can总线的工作特性,制定合适的基于can总线通信的工作流程图。
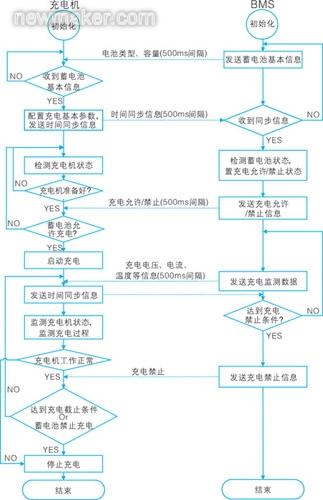
图2 充电机与电池管理系统之间的工作流程图
3 充电机与bms的can通信
3.1 can1通信
蓄电池与电池管理系统之间的通信流程图如图 2所示,在图2中将充电机的工作流程和电池管理系统的工作流程联系在了一起,并且通过can总线进行数据的传输。充电机与蓄电池之间通过can总线的数据传输主要包括以下几个部分:
(1)开始给蓄电池充电之前,bms首先和充电机建立联系,然后将电池的类型、容量、最大的充电允许电压电流等信息通过can总线发送给充电机。
(2)充电过程中,bms将电池的充电参数电压、电流、soc等信息定时(500ms)发送给充电机,为充电机改变充电策略、调整充电参数提供参考。
(3) 充电结束后,bms将充电完成的信息通过can总线发送给充电机,并切断和充电机之间的通信,完成充电。
3.2 can2通讯
充电机与充电监控系统的通信系统为一个独立的can网络,包括了监控计算机和若干台充电机。充电机与充电监控系统的通信网络在应用层应能实现以下功能:
(1) 监控计算机至充电机传送的数据:
l充电机开机
l充电机停机
l紧急停机
l充电机参数设置
l时间同步
(2) 充电机至监控计算机传送的数据:
l电压、电流、温度数据传输
l累计输入输出电量
l充电机故障代码
l充电时间
(3)监控计算机通过充电机读取蓄电池的数据:
l蓄电池的标识、类型及参数
l蓄电池电压数据
l蓄电池温度数据
l蓄电池soc数据
l蓄电池实时状态
3.3 can3通讯
充电机与电源模块之间的通信主要是为了实现充电机的软件并联均流功能,在工作的过程中需要传输的是充电过程中的电压电流等参数值,以及充电机的工作状态等信息。其工作流程包括了以下几个部分:
(1) 充电开始之前,电源模块初始化,检查工作状态,确定能否正常工作,设立允许或禁止充电标志位,并且将信息发送给主控制器;
(2) 充电机主控制器在得到电池信息,确定充电策略后,会选择适当的充电模块参与充电,并将充电的参数发送给电源模块;
(3) 在充电机主控制器确认需要的电源模块可以工作后,发出开始充电的指令,并采集充电的参数;
(4) 主控制器根据采集的数据实时改变充电策略,调整充电参数,并实时的监控模块的工作状态;
(5) 当发现充电过程中有电源模块发出报警信息后,立即启动备用模块,并将问题模块切除充电状态;
(6) 充电机的主控制器在综合充电状态信息后,做出停止充电的判断,并结束充电过程,恢复待机状态。
图4为充电机内部并联均流的工作流程图,将充电机主控制器和电源模块的详细工作流程做了规定,同时包括了can总线在其中的串联作用。
- 电动汽车:颠覆性的快速充电与非接触充电技术(09-20)
- 电动汽车的基本概述及重要组成(10-28)
- 矢量控制变频器在混合动力电动汽车中的应用(01-27)
- 基于CAN总线的电动汽车控制系统设计(05-25)
- 电动汽车驱动系统中的超级电容原理(05-21)
- 动力电池管理系统硬件设计技术(05-30)