道路车辆监控管理平台设计方案分析
时间:12-25
来源:互联网
点击:
一、概述
当前,在各类刑事犯罪当中和机动车辆有关的案件为数不少,如交通肇事逃逸、盗抢机动车辆等等。如果在市区的重要道路及重点路段设立一个自动监控点实现对过往车辆的情况进行24小时不间断、全天候的自动记录,即安装公路车辆监测记录系统,则可为公安部门侦破案件提供重要线索与依据,并能有效地提高公安部门对机动车辆的管理水平。“道路智能卡口”系统的建设是各地创建平安大道、实现道路安全不可缺少的重要手段,也是当前各地公安交警部门创建“科技强警”示范城市的的一个重要举措。
公路车辆监测记录系统利用先进的光电、计算机图像处理、模糊识别、远程数据访问等技术研制而成。系统对通过被监控路段的每一台机动车辆车辆全貌(颜色、车型、和车牌号)进行连续全天候实时记录,系统对抓拍到的的车辆图像进行动态布控,对非法行驶的车辆进行抓拍,并将车辆通过卡口监控点的时间、车速及车辆类型等信息一并生成数据文件保存,通过宽带网络将各个监控点的信息传送到远端的监控指挥中心,实现有机共享。
本方案由CSST集团下属子公司安防销售(中国)有限公司为上海市浦东新区城市智能监控系统项目设计,它根据项目要求所提实际情况、本公司工程技术人员的实地考察,且结合本公司多年来从事安防监控的实践经验而设计的。
二、技术设计方案
1 系统组成
系统从设备结构上分为路口前端监控系统和中心管理系统两部分,如图2-1所示,从逻辑结构上,由四个单元组成,前端摄像及辅助照明单元、图像采集及处理单元、传输单元及中心管理单元。

图2-1 系统结构图
2 前端摄像及辅助照明单元
根据道路实际情况,前端摄像采用1/3''SonyEXviewCCD摄像(镜头为自动光圈、18倍光学变焦)对车辆的全貌进行监控,称为全景摄象机。单方向3车道以内(含),每个方向安装1台全景摄象机,分别用于拍摄车辆前部全景照片;单方向3车道以上情况,为取得好的图片效果,需增加全景摄象机数量。摄象机均安装于室外防护罩内。
夜间光线不足时采用低功率的CDM灯或LED灯作为辅助光源进行照明,视现场灯光环境每车道配置1~2个辅助光源。
本方案采用CSST旗下安防销售公司的红外重型智能变速云台、摄像机。
3 图像采集及处理单元
该单元由1台视频服务器及相应的控制软件组成。控制软件包括图像采集处理软件及远程管理软件。
本方案采用CSST旗下安防销售(中国)有限公司的视频服务器。
4 传输单元
图片信息被存储在现场的嵌入式DVR内,数据将以循环覆盖的方式记录在计算机硬盘内,当需要查询或调出数据时,需采用宽带通讯网络回传数据,参考图2-4。
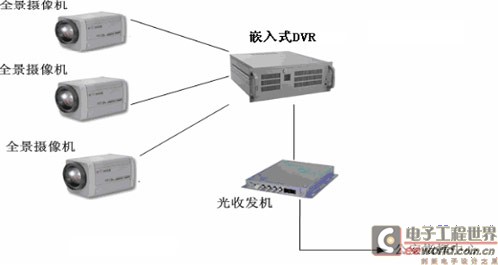
图2-4 路口前端工作站示意图(现场型)
以上各个单元组成单机系统,即为路口监控工作站,每个监测点至少需要安装一套。
5 中心管理单元
为了使指挥中心能够迅速获得各个前端监控点的报警信息,发挥指挥中心集中指挥、统一调度的功能,提高警力布防的快速性和准确性,所以有必要建立一套道路车辆监控系统管理平台。即在指挥中心设立一台中心数据服务器。指挥中心软件由控制软件、数据管理软件、设备监测软件等组成。各个用户终端分别具有相应的权限,均为公安网内的内部用户,实行分级管理。
三、设计说明
1 前端配置
1.1 前端红外重型智能变速云台、摄像机单元
(1)红外重型智能变速云台
采用安防销售公司的红外重型智能变速云台,全天候环境设计,高强度铝合金精铸外壳,抗冲击、防腐蚀,防护等级达到IP66,带雨刷功能,抗强风,运行平稳可靠,红外夜视距离大于100米,在夜间对被监控车道路面进行补光,可以获得如同白天一样的效果的车辆图片,如图所示。
(2)彩色摄像机及镜头
摄像机采用安防销售公司1/2''ExviewHADCCD摄像机。其水平清晰度为520,最低照度小于0.01LUX,另外还具有强光抑制功能,能够在夜间排除车辆前大灯照射对照片产生的影响,从而拍得清晰的车牌号码。镜头采用日本COMPUTAR公司的8倍(8mm-48mm)的手动变焦镜头,便于安装调试时获得最佳的取景范围。
1.2 图像采集及处理单元
图像采集嵌入式DVR,所记录的全景图像分辨率不低于768×576像素点,全景图像应能人眼看清车辆类型、号牌、颜色和轮廓及装载情况。按每部车辆至少存贮全景图像1张计算,可储存至少150万辆车的图像,具体视当地车流量而定,一般情况下至少可储存半年以上车辆信息。当硬盘空间不足时,自动对记录时间最早的车辆信息和图片进行循环覆盖。
1.3 传输单元
本设计不对传输线路进行设计,由用户提供光缆,为实现与监控中心通讯,每个监控点设计安装一对光纤收发器(10/100M自适应)或多路视频复用光端机。
LED 红外 嵌入式 ADC 收发器 电阻 视频监控 电子 相关文章:
- 基于超声波检测的倒车雷达设计(11-28)
- 另类传感器观念:汽车传感器(11-30)
- RGB色彩传感器工作原理及应用方案分析(上)(01-04)
- RGB色彩传感器工作原理及应用方案分析(下)(01-04)
- 凌特LT3474 LED驱动器利用汽车电源给高亮度LED供电(01-12)
- 高压、可调恒流LED驱动器MAX16800及其应用(02-19)