新型车辆模拟驾驶训练系统动感系统设计
时间:11-30
来源:互联网
点击:
3.3 动感平台及其控制系统
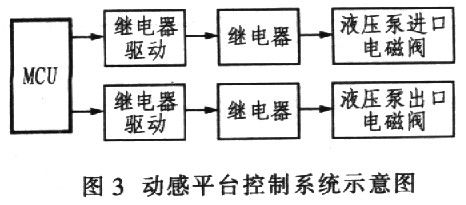
动感平台是动感系统的执行部分,它由6个液压泵和模拟驾驶室的底板构成。其工作原理是MCU根据传来的动感数据通过继电器驱动电路控制相应继电器,使相应液压泵的相应电磁阀开启或闭合,进而模拟驾驶室上下颠簸、前后俯仰或左右摇摆,如图3所示。
4 软件设计
由于HMR3000和nRF905分别通过RS-232接口和SPI接口与MCU进行通信,故整个系统的硬件电路相对比较简单,但是,由于HMR3000采用NMEA0183协议格式输出数据,nRF905收发数据又有严格的时序要求,因而软件设计相对比较复杂。
4.1 HMR3000与MCU的通信协议
HMR3000的串行通信是根据NMEA0183标准制定的简单的ASCⅡ协议,可以在单片机系统中使用RS-232或RS-485接口电路。ASCⅡ码的传输和接收使用1位起始位、8位数据位、无奇偶校验位和I位停止位,每个码有10位。数据传输率可选择l200 bit/s、2 400 bit/s、4 800 bit/s、9 600 bit/s、19 200bit/s、38 400 bit/s。
4.2 MCU接收HMR3000的数据
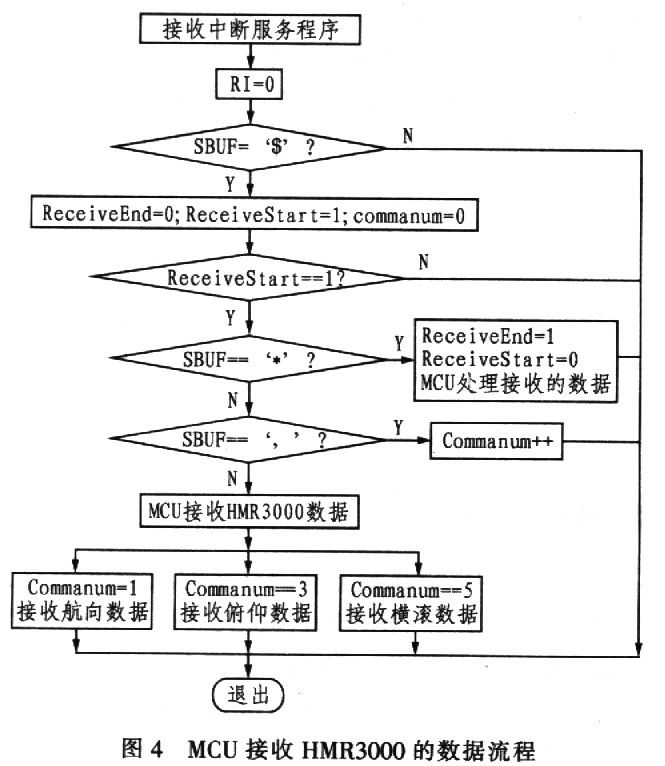
启动HMR3000后,设定好HMR3000的数据单位、进制及其数据采集速率,每次数据采集后HMR3000自动向MCU发送数据。由于它采用NMEA0183协议标准的HPR格式即“$PTNTHPR,x..x,a,x..x,a,x..x,a*hh”格式输出,此格式中不仅含有效数据“x..x”和其状态“a”,还包含有‘$’、‘P’、‘T’、‘*’、‘h’等相关格式字符,因此在程序中要加以区分。动感系统中将字符‘$’作为一组有效数据传输的开始,将字符‘*’作为一组有效数据传输的结束,并通过计算接收逗号‘,’的个数判断有效数据的开始。MCU接收HMR3000的数据流程如图4所示。
4.3 nRF905与MCU的通信协议
nRF905与MCU之间的通信采用SPI通信协议,使用2条控制信号线CSN、SCK和2条数据信号线MOSI、MISO进行通信。CSN用来控制外围设备的选通(低电平有效),SCK提供同步时钟,MOSI、MISO分别为主从设备的输入/输出线。在SPI通信过程中,主从设备均在时钟的下降沿从各自的输出线输出1位数据,在时钟的上升沿从各自的输入线读入l位数据。
4.4 nRF905发送和接收数据
nRF905发送或接收数据时必须严格遵守发送或接收时序,否则将导致发送或接收失败。
4.4.1 发送数据
nRF905的发送时序如图5所示,其中.TA-TB是nRF905的命令字寄存器、匹配地址寄存器和发送数据寄存器编程时间;TD-Tl是发送启动脉冲,至少为10μs;T1-T2是nRF905的自动编码,至少为650 μs;T2-T3是自动发送数据;T3是发送结束时DR置高电平,表示发送结束。具体步骤如下:
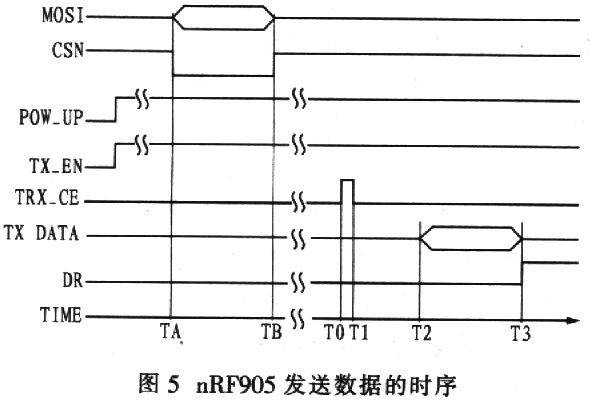
(1)给nRF905上电后,MCU将TX_EN置为高电平,将TRX_CE置为低电平,使nRF905进入发送模式;
(2)MCU通过SPI接口按照SPI通信协议向nRF905写命令字、匹配地址和将要发送的数据;
(3)使TRX_CE产生1个至少10 μs的发送脉冲;
(4)nRF905接到发送脉冲后自动编码、自动发送。如果nRF905命令字寄存器中的AUTO_RE-TRAN位被设置为高电平,则nRF905不断重发,直到TRX_CE被置高电平;
(5)nRF905发送数据后,DR自动置高电平。MCU可以通过DR判断发送完毕与否。以便发送下一组数据。
4.4.2 接收数据
nRF905接收时序如图6所示,具体步骤如下:
(1)给nRF905上电后,MCU通过将TX_EN置低电平和TRX_CE置高电平,使nRF905进入接收模式(图6中的TA时刻);
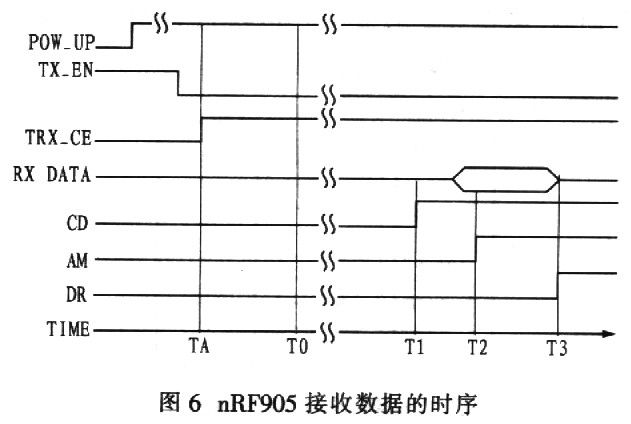
(2)650μs后,nRF905开始检测有无发送的数据(图6中的T0时刻);
(3)当nRF905探测到有接收频率的载波时,将CD置高电平(图6中的Tl时刻);
(4)当nRF905接收完有效匹配地址后,将AM置高电平(图6中的T2时刻);
(5)当nRF905接收完有效数据且CRC检验正确后,将DR置高电平(图6中的T3时刻);
(6)MCU在DR变高电平后可以通过SPI读取nRF905接收的数据。
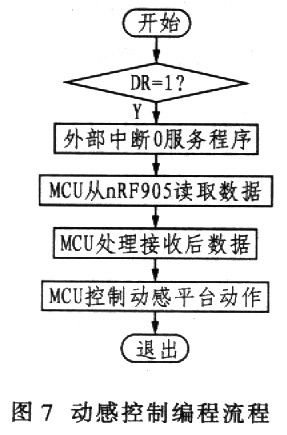
4.5 动感控制部分的编程
根据硬件电路的连接,可以利用外部中断0服务程序实现动感的实时控制,这样,MCU在DR变成高电平后即可控制动感平台动作,提高了实效性。程序流程如图7所示。
5 结束语
据考证,国内现有的车辆模拟驾驶训练系统均未安装动感系统。车辆模拟驾驶动感系统具有广阔的发展前景。本文为该系统的设计提供了切实可行、安全可靠的参考设计方案。
动感平台是动感系统的执行部分,它由6个液压泵和模拟驾驶室的底板构成。其工作原理是MCU根据传来的动感数据通过继电器驱动电路控制相应继电器,使相应液压泵的相应电磁阀开启或闭合,进而模拟驾驶室上下颠簸、前后俯仰或左右摇摆,如图3所示。
4 软件设计
由于HMR3000和nRF905分别通过RS-232接口和SPI接口与MCU进行通信,故整个系统的硬件电路相对比较简单,但是,由于HMR3000采用NMEA0183协议格式输出数据,nRF905收发数据又有严格的时序要求,因而软件设计相对比较复杂。
4.1 HMR3000与MCU的通信协议
HMR3000的串行通信是根据NMEA0183标准制定的简单的ASCⅡ协议,可以在单片机系统中使用RS-232或RS-485接口电路。ASCⅡ码的传输和接收使用1位起始位、8位数据位、无奇偶校验位和I位停止位,每个码有10位。数据传输率可选择l200 bit/s、2 400 bit/s、4 800 bit/s、9 600 bit/s、19 200bit/s、38 400 bit/s。
4.2 MCU接收HMR3000的数据
启动HMR3000后,设定好HMR3000的数据单位、进制及其数据采集速率,每次数据采集后HMR3000自动向MCU发送数据。由于它采用NMEA0183协议标准的HPR格式即“$PTNTHPR,x..x,a,x..x,a,x..x,a*hh”格式输出,此格式中不仅含有效数据“x..x”和其状态“a”,还包含有‘$’、‘P’、‘T’、‘*’、‘h’等相关格式字符,因此在程序中要加以区分。动感系统中将字符‘$’作为一组有效数据传输的开始,将字符‘*’作为一组有效数据传输的结束,并通过计算接收逗号‘,’的个数判断有效数据的开始。MCU接收HMR3000的数据流程如图4所示。
4.3 nRF905与MCU的通信协议
nRF905与MCU之间的通信采用SPI通信协议,使用2条控制信号线CSN、SCK和2条数据信号线MOSI、MISO进行通信。CSN用来控制外围设备的选通(低电平有效),SCK提供同步时钟,MOSI、MISO分别为主从设备的输入/输出线。在SPI通信过程中,主从设备均在时钟的下降沿从各自的输出线输出1位数据,在时钟的上升沿从各自的输入线读入l位数据。
4.4 nRF905发送和接收数据
nRF905发送或接收数据时必须严格遵守发送或接收时序,否则将导致发送或接收失败。
4.4.1 发送数据
nRF905的发送时序如图5所示,其中.TA-TB是nRF905的命令字寄存器、匹配地址寄存器和发送数据寄存器编程时间;TD-Tl是发送启动脉冲,至少为10μs;T1-T2是nRF905的自动编码,至少为650 μs;T2-T3是自动发送数据;T3是发送结束时DR置高电平,表示发送结束。具体步骤如下:
(1)给nRF905上电后,MCU将TX_EN置为高电平,将TRX_CE置为低电平,使nRF905进入发送模式;
(2)MCU通过SPI接口按照SPI通信协议向nRF905写命令字、匹配地址和将要发送的数据;
(3)使TRX_CE产生1个至少10 μs的发送脉冲;
(4)nRF905接到发送脉冲后自动编码、自动发送。如果nRF905命令字寄存器中的AUTO_RE-TRAN位被设置为高电平,则nRF905不断重发,直到TRX_CE被置高电平;
(5)nRF905发送数据后,DR自动置高电平。MCU可以通过DR判断发送完毕与否。以便发送下一组数据。
4.4.2 接收数据
nRF905接收时序如图6所示,具体步骤如下:
(1)给nRF905上电后,MCU通过将TX_EN置低电平和TRX_CE置高电平,使nRF905进入接收模式(图6中的TA时刻);
(2)650μs后,nRF905开始检测有无发送的数据(图6中的T0时刻);
(3)当nRF905探测到有接收频率的载波时,将CD置高电平(图6中的Tl时刻);
(4)当nRF905接收完有效匹配地址后,将AM置高电平(图6中的T2时刻);
(5)当nRF905接收完有效数据且CRC检验正确后,将DR置高电平(图6中的T3时刻);
(6)MCU在DR变高电平后可以通过SPI读取nRF905接收的数据。
4.5 动感控制部分的编程
根据硬件电路的连接,可以利用外部中断0服务程序实现动感的实时控制,这样,MCU在DR变成高电平后即可控制动感平台动作,提高了实效性。程序流程如图7所示。
5 结束语
据考证,国内现有的车辆模拟驾驶训练系统均未安装动感系统。车辆模拟驾驶动感系统具有广阔的发展前景。本文为该系统的设计提供了切实可行、安全可靠的参考设计方案。
仿真 单片机 机器人 ARM 模拟电路 MCU 电压 电路 继电器 相关文章:
- 车辆导航定位仿真试验系统研究(05-26)
- 柴油发电机组转速控制半物理仿真(01-08)
- dSPACE实时仿真系统介绍(05-11)
- 基于DSP的汽车内噪声主动控制系统的设计(06-09)
- Multisim仿真软件在发动机电控设计中的应用(06-29)
- 仿真技术驱动混合动力车和电动汽车设计(01-05)