一种基于MSP430的倒车雷达设计
时间:11-30
来源:互联网
点击:
系统软件设计
软件采用模块化设计,程序由主程序、测距子程序和键盘显示子程序、时钟显示子程序等多个模块组成,调试过程中对其中每个功能模块和子程序逐一调试,在每个子程序都完成指定的功能后,再进行综合调试。系统的软件流程如图8所示。
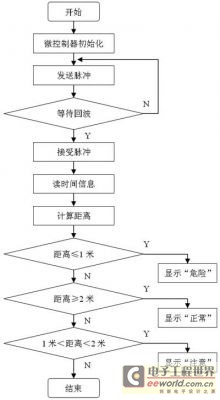
图8 系统软件流程图
超声波发射电路发出超声波的同时计数器开始计数,当遇到障碍物反馈信号到超声波接收器接收,经CX20106接收电路处理后,产生一个低脉冲,该信号传送给单片机产生中断,调用测距子程序,计算出测量距离,调用显示子程序,根据不同的测量数值在液晶上显示距离和报警。当距离大于2m,显示“安全”和测量距离,继续测量;当距离小于1m时,显示“危险”和测量距离,由P1.2位驱动蜂鸣器报警;当距离小于2m且大于1m时,显示“注意”和测量距离。为增强抗干扰能力,系统连续发射超声波测量三次,从中剔除最大最小值,取中间值计算出精确的距离。这样每秒可测约三个数据,仍然可以满足实时性要求。
结语
该倒车雷达采用了高性能的MSP430F2274单片机,并充分利用了其片上资源使得系统功能丰富,使用的外围芯片减少,系统可靠性得到提高。该倒车雷达应用于汽车中,当驾驶员倒车时,从液晶显示屏上一目了然便知道障碍物离车的距离,克服了后视镜小,视野窄的缺点,消除了倒车造成的事故隐患。
软件采用模块化设计,程序由主程序、测距子程序和键盘显示子程序、时钟显示子程序等多个模块组成,调试过程中对其中每个功能模块和子程序逐一调试,在每个子程序都完成指定的功能后,再进行综合调试。系统的软件流程如图8所示。
图8 系统软件流程图
超声波发射电路发出超声波的同时计数器开始计数,当遇到障碍物反馈信号到超声波接收器接收,经CX20106接收电路处理后,产生一个低脉冲,该信号传送给单片机产生中断,调用测距子程序,计算出测量距离,调用显示子程序,根据不同的测量数值在液晶上显示距离和报警。当距离大于2m,显示“安全”和测量距离,继续测量;当距离小于1m时,显示“危险”和测量距离,由P1.2位驱动蜂鸣器报警;当距离小于2m且大于1m时,显示“注意”和测量距离。为增强抗干扰能力,系统连续发射超声波测量三次,从中剔除最大最小值,取中间值计算出精确的距离。这样每秒可测约三个数据,仍然可以满足实时性要求。
结语
该倒车雷达采用了高性能的MSP430F2274单片机,并充分利用了其片上资源使得系统功能丰富,使用的外围芯片减少,系统可靠性得到提高。该倒车雷达应用于汽车中,当驾驶员倒车时,从液晶显示屏上一目了然便知道障碍物离车的距离,克服了后视镜小,视野窄的缺点,消除了倒车造成的事故隐患。
汽车电子 总线 单片机 MSP430 电路 电路图 振荡器 PWM 电压 传感器 放大器 集成电路 滤波器 电阻 电容 LCD 相关文章:
- 电子技术的革新先锋(11-21)
- 现代汽车电子技术综述(06-24)
- 新技术、新应用让传感器深入汽车电子设备的各个角落(05-11)
- RFID技术在商用汽车生产及使用中的应用(05-11)
- 模糊控制在汽车离合器中的应用(05-11)
- 如何利用可编程器件设计车用显示系统(08-30)