GPS/GPRS 车载监控终端的设计与实现
时间:11-17
来源:互联网
点击:
近年来,随着汽车的普及和道路的建设,城际间的经济往来更加频繁,活动的区域也越来越大,由此产生了交通拥挤、车祸增加、废气排放量增加等严重问题。智能交通系统(IntelligentTransportSystem)的出现有效地改善了以上各种交通问题。车载监控系统是智能交通系统的一个分支,它集先进的无线定位技术、地理信息系统和现代移动通信技术于一身,不仅在智能交通系统中担负主要作用,同时还能提供防盗防抢劫报警、紧急医疗求助、娱乐等多种服务。这些都促使各研发机构大力开发车辆监控系统,本文就选取整个系统中的车载终端模块进行设计与实现。
1 车辆监控系统总体结构
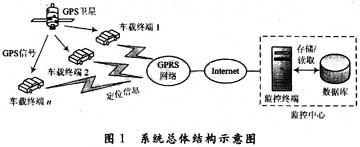
整个系统由GPS卫星、车载终端、通信网络(GPRS和Internet)和监控中心组成。车辆在运行过程中,车载终端的GPS接收机接收定位数据,计算出车辆当前的经度、纬度、速度、航向和其他信息(时间、状态)等,然后通过GPRS网络传送到具有静态IP地址的监控中心,并存人中心数据库。监控中心在接到车辆上传的信息后,根据车辆的当前状况科学地进行调度和管理,从而提高运营效率。客户也可以通过Internet或电话来查询特定车辆的当前状况。系统的总体结构如图1所示。
2 车载终端的功能
车载GPS/GPRS终端的卫星接收模块采集到GPS卫星数据,经过数据处理得到车辆的地理坐标信息。该信息通过车载终端处理之后,由GPRS无线通信模块发送到GPRS无线通信网上。GPRS网络根据相应的协议在车载终端和接人Internet网的监控中心之间建立一条支持TCP/lP的数据通道。车载GPS/GPRS终端依靠该数据通道和监控中心之间进行信息的交互。监控中心还可以通过该通道向下发送控制命令和服务信息。另外,除了车辆定位,系统还可以提供诸如防盗防抢、对移动车辆进行断油断电、显示调度信息、医疗求助、移动电话等多种服务。
3 车载终端硬件设计
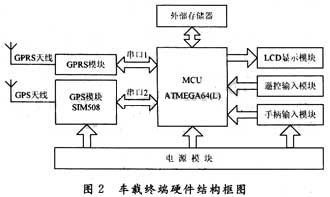
车载终端硬件系统以单片机和GPS+GPRS模块为核心,属于经济型功能终端,其结构如图2所示。
3.1 信息处理和控制模块
采用AVR系列的单片机系统,主要功能是进行信息处理和控制车载台的各组成部分按照通信协议的要求执行响应的操作。该模块由CPU、外部存储器、I/O接口以及控制逻辑电路组成。其中CPU采用ATMEGA64(L)单片机实现,它是基于增强的AVRRISO结构的低功耗8位CMOS微控制器,曲于其先进的指令集以及单时钟周期指令执行时间,ATMEGA64(L)的数据吞吐率高达1MIPS/MHz,从而可以减缓系统在功耗和处理速度之间的矛盾。该单片机具有两个串口,分别用来与GPS和GPRS模块通信。
3.2 GSM/GPRS+GPS模块
采用SIMCOM公司的SIM508模块。SIM508模块是一款将三频GSM/GPRS和具有20通道能力的GPS完全整合到一个模块中(34mm×55mm×3mm)的产品。该产品的设计完全满足车载应用环境要求(温度、湿度、防震等)。特别地,整合了附加元器件的SIM508可以节省很多时间和成本。SIM508支持NMEA-0183,SiRFbinary和RTCMSC-104三种GPS数据格式,能够满足不同的设计要求。车载终端通过模块中的GPS部分获得车辆的具体位置,经过CPU处理后,显示给用户并通过GPRS部分将该信息发送到监控中心,以实现对车辆的实时定位跟踪,同时还能实现语音和短消息通信功能。
3.3 输入输出模块
输出通过12232F液晶模块实现,可以显示图形,也可以显示7.5×2个(16×16点阵)汉字,与外部CPU接口可以采用并行或串行,考虑到编程的简易性,本车载终端采用串行接口连接。
车载终端的输入有两种方式:遥控器输入(主要输入设备)和手柄输入。考虑到紧急情况下手柄输入的局限性,这里采用遥控器作为主要输入设备,可以用来完成语音拨号、收发短消息、医疗求助、维修求助、启闭设备等功能。手柄装置包括确认、返回和上、下翻动四个功能键,为方便用户输入而设计。
4 车载终端软件设计
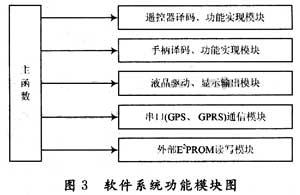
本软件系统采用模块化设计方法,每个模块实现一个功能或一个协议,各功能模块以子函数形式出现,缩短了软件开发时间,易于程序修改和移植,同时,在编写软件时,还留有一些软件应用接口,便于软件升级,如增加新协议。软件系统功能模块如图3所示。
4.1 系统工作流程
车载终端软件系统的主要功能是由主程序完成的。主程序采用状态机的系统结构,其工作流程如图4所示。
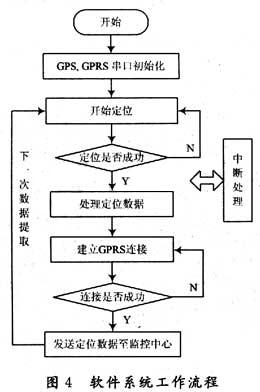
程序工作时先进行GPS和GPRS串口初始化工作,然后进入主控制循环。在主控循环中,先识别GPS数据是否有效,即定位是否成功,定位成功则系统转到下一个状态,建立GPRS连接,否则重新定位。建立好GPRS连接后便可以向监控中心发送处理后的定位数据。同时,主程序运行的过程中,还能响应遥控器输入中断请求,以便实现其他功能。
1 车辆监控系统总体结构
整个系统由GPS卫星、车载终端、通信网络(GPRS和Internet)和监控中心组成。车辆在运行过程中,车载终端的GPS接收机接收定位数据,计算出车辆当前的经度、纬度、速度、航向和其他信息(时间、状态)等,然后通过GPRS网络传送到具有静态IP地址的监控中心,并存人中心数据库。监控中心在接到车辆上传的信息后,根据车辆的当前状况科学地进行调度和管理,从而提高运营效率。客户也可以通过Internet或电话来查询特定车辆的当前状况。系统的总体结构如图1所示。
2 车载终端的功能
车载GPS/GPRS终端的卫星接收模块采集到GPS卫星数据,经过数据处理得到车辆的地理坐标信息。该信息通过车载终端处理之后,由GPRS无线通信模块发送到GPRS无线通信网上。GPRS网络根据相应的协议在车载终端和接人Internet网的监控中心之间建立一条支持TCP/lP的数据通道。车载GPS/GPRS终端依靠该数据通道和监控中心之间进行信息的交互。监控中心还可以通过该通道向下发送控制命令和服务信息。另外,除了车辆定位,系统还可以提供诸如防盗防抢、对移动车辆进行断油断电、显示调度信息、医疗求助、移动电话等多种服务。
3 车载终端硬件设计
车载终端硬件系统以单片机和GPS+GPRS模块为核心,属于经济型功能终端,其结构如图2所示。
3.1 信息处理和控制模块
采用AVR系列的单片机系统,主要功能是进行信息处理和控制车载台的各组成部分按照通信协议的要求执行响应的操作。该模块由CPU、外部存储器、I/O接口以及控制逻辑电路组成。其中CPU采用ATMEGA64(L)单片机实现,它是基于增强的AVRRISO结构的低功耗8位CMOS微控制器,曲于其先进的指令集以及单时钟周期指令执行时间,ATMEGA64(L)的数据吞吐率高达1MIPS/MHz,从而可以减缓系统在功耗和处理速度之间的矛盾。该单片机具有两个串口,分别用来与GPS和GPRS模块通信。
3.2 GSM/GPRS+GPS模块
采用SIMCOM公司的SIM508模块。SIM508模块是一款将三频GSM/GPRS和具有20通道能力的GPS完全整合到一个模块中(34mm×55mm×3mm)的产品。该产品的设计完全满足车载应用环境要求(温度、湿度、防震等)。特别地,整合了附加元器件的SIM508可以节省很多时间和成本。SIM508支持NMEA-0183,SiRFbinary和RTCMSC-104三种GPS数据格式,能够满足不同的设计要求。车载终端通过模块中的GPS部分获得车辆的具体位置,经过CPU处理后,显示给用户并通过GPRS部分将该信息发送到监控中心,以实现对车辆的实时定位跟踪,同时还能实现语音和短消息通信功能。
3.3 输入输出模块
输出通过12232F液晶模块实现,可以显示图形,也可以显示7.5×2个(16×16点阵)汉字,与外部CPU接口可以采用并行或串行,考虑到编程的简易性,本车载终端采用串行接口连接。
车载终端的输入有两种方式:遥控器输入(主要输入设备)和手柄输入。考虑到紧急情况下手柄输入的局限性,这里采用遥控器作为主要输入设备,可以用来完成语音拨号、收发短消息、医疗求助、维修求助、启闭设备等功能。手柄装置包括确认、返回和上、下翻动四个功能键,为方便用户输入而设计。
4 车载终端软件设计
本软件系统采用模块化设计方法,每个模块实现一个功能或一个协议,各功能模块以子函数形式出现,缩短了软件开发时间,易于程序修改和移植,同时,在编写软件时,还留有一些软件应用接口,便于软件升级,如增加新协议。软件系统功能模块如图3所示。
4.1 系统工作流程
车载终端软件系统的主要功能是由主程序完成的。主程序采用状态机的系统结构,其工作流程如图4所示。
程序工作时先进行GPS和GPRS串口初始化工作,然后进入主控制循环。在主控循环中,先识别GPS数据是否有效,即定位是否成功,定位成功则系统转到下一个状态,建立GPRS连接,否则重新定位。建立好GPRS连接后便可以向监控中心发送处理后的定位数据。同时,主程序运行的过程中,还能响应遥控器输入中断请求,以便实现其他功能。
GPS 单片机 AVR 电路 CMOS MIPS 相关文章:
- 基于GSM的GPS车辆定位监控系统(上)(11-30)
- 基于GSM的GPS车辆定位监控系统(下)(11-30)
- 另类传感器观念:汽车传感器(3)(11-30)
- 基于GPRS网络的GPS图形导航仪(上)(01-08)
- 基于GPRS网络的GPS图形导航仪(下)(01-08)
- 卫星定位与导航技术(01-23)