单通道通讯模式异步流水线控制器
时间:12-14
来源:互联网
点击:
为了实现异步电路在实际应用中的低功耗、高性能特性,提出了一种基于单通道通讯协议的高速异步流水线控制单元和一种使用Muller C单元的高鲁棒性的QDI(quasidelay insensitive)异步流水线控制单元。第1种异步流水线控制单元采用独立的正反向响应电路,使得比近期提出的超高速异步流水线控制单元GasP电路的正向响应减小了50%的信号翻转。该电路使用TSMC 0.25μmCMOS工艺实现,HSPICE模拟结果表明与GasP电路相比正向响应时间减少38.1%.可以工作在2.2GHz;第2种控制器与流行的QDI异步控制器STFB(single-track full-buffer)电路相比.以较少的面积代价,实现了时序验证上的极大简化。
异步电路因其具有低功耗、高性能和低电磁干扰的特性,正受到越来越多的关注。异步流水线是异步电路实现的主要形式,从而得到广泛研究,实用的异步流水线结构也被不断提出,例如在文中提出的超高速异步流水线控制单元GasP电路,在文中提出的准延时无关QDI异步流水线控制单元WCHB(weak condition half buffer)、PCHB(precharged fullbuffer),以及在文中提出的基于单通道通讯协议的QDI异步流水线控制单元STFB。
提出一种基于单通道通讯协议的高速异步流水线控制单元,与文中GasP电路的正向响应需要4次信号转换相比,该控制单元的正向响应只需要2次信号转换,从而大大减小了流水线的正向响应时间。同时,为了简化时序验证,另一种具有更强鲁棒性的QDI异步流水线控制单元被提出,该控制单元很好地解决了STFB控制单元高的功耗和面积消耗问题。
1 GasP电路与STFB电路
典型异步电路系统由一系列相互通讯的模块组成,在这些模块之间需要基于异步握手协议的通讯通道来完成数据交换,本文根据通讯通道的延时模型将其分为有限延时通讯通道和准延时无关通讯通道,图1给出了这两种类型的通讯通道。
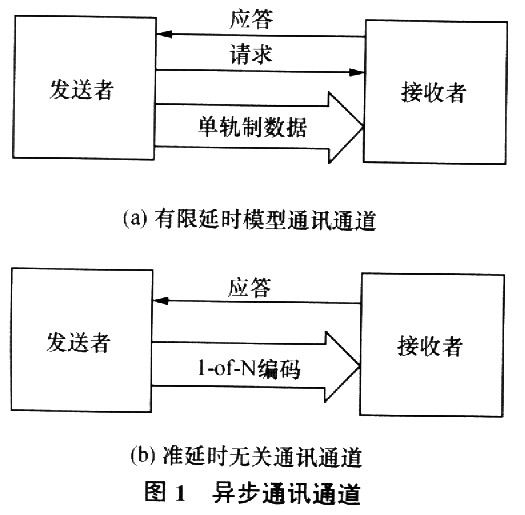
其中图la中给出的有限延时的通讯通道,由于采用单轨制编码方式,可以有效的复用现有同步电路单元,并且在很大程度上节约了面积。但是有限延时模型决定了请求信号与数据有效之间存在复杂时序关系,在物理设计时,时序验证是一项复杂的工作。准延时无关通讯通道如图lb所示,该通道采用1-of-N的编码方式,此种编码使用冗余码,数据本身包含数据有效信息,不需要请求信号指示数据有效,这样也就有效避免了请求信号与数据有效信号之间复杂的时序关系。准延时无关通讯通道有效地简化了时序约束并易于实现异步电路的平均延时,但是,由于其需要检测数据有效,势必会引入额外的延时。
与同步电路相比,异步电路需要实现发送者和接收者之间的握手协议,因而会引入额外的延时、功耗以及面积的代价,如何设计有竞争力的控制器实现握手协议是异步电路设计的关键。
1.1 GasP电路
GasP电路作为高速异步流水线控制器被提出,图2给出了GasP电路的基本结构,通过逻辑努力电路优化之后,图中每一次信号翻转的延时相等。
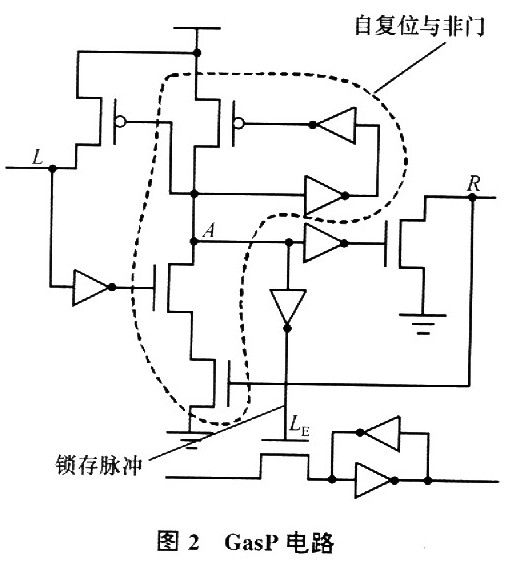
初始化之后,节点L、 R和A均为高电平,当前一级电路准备好数据时,节点L将被设成低电平,此时自复位与非门的输出发生翻转,节点A被驱动到低电平,经过一级反相器,节点LE变为高电平,此时数据通过锁存器传输到下一流水级。当节点A电平为高后,节点L通过上拉的PMOS恢复到高电平,经过两级延时,节点R被驱动成低电平。在A为低电平后两个门延时,自复位与非门的两个输入为低电平,因此,自复位与非门的输出将自行恢复到高电平。在这一状态下,如果前一级电路再次将L驱动成低电平,自复位与非门的输出不会再次发生翻转,直到后一级电路完成对当前锁存数据的处理,将R重新设置成高电平。
正向响应时间定义为节点L变低到节点R变低过程中的信号转换次数。反向响应时间定义为节点R变高到节点L变高过程的信号转换次数。根据以上定义,GasP电路的正向响应时间为4次信号转换,而反向响应时间为2次信号转换。异步流水线的输入到输出的响应时间由流水级的正向响应时间决定,因此,Gasp电路获得高的吞吐率的同时,是以大的响应时间为代价的。当Gasp电路各级门的延时失配时,存在直流电流,从而引入了额外的功耗,并减慢了节点A由低向高的翻转速度。同时,GasP电路不利于实现准延时无关电路,在电路物理设计时,复杂的时序验证是不可避免的。
1.2 STFB电路
异步流水线控制器STFB电路由Ferretti M和Beerel P A提出,其电路结构如图3所示,其采用双轨制编码实现准延时无关异步通讯。
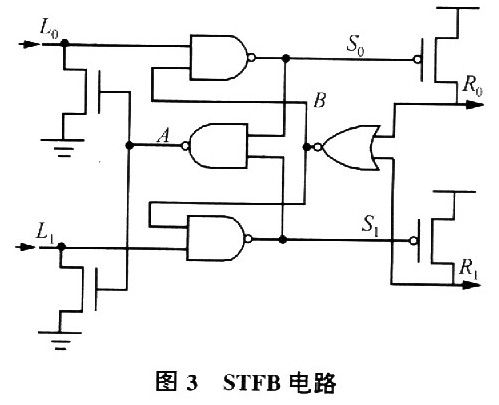
工作过程如下:初始化以后,节点L0、L1、R0、R1以及A均为低电平,节点B为高电平;一旦前一级电路准备好数据,L0和L1其中一个设置成高电平,这里假设L0被前一级电路设置成高电平,这时通过与非门S0节点设置成低电平。当S0为低时,节点A和节点R0被驱动成高。节点A变高以后,L0和L1被重新拉回到低电平,这标志着前一级电路可以发送新的数据。当R0变高以后,B节点由高电平变成低电平,防止S0、S1节点被再次拉高,直到后一级电路处理完Ro、R1上的数据,将R0设置成高电平之后,B节点重新回到高电平,新的数据才允许被再次传送到下一级。
从图3不难得出,STFB控制器的正向响应需要2次信号翻转,而反向响应需要4次信号翻转,一个周期的信号翻转次数与GasP电路一样,都是6次。当一个流水线的输出受限时,流水级的反向响应将影响其性能,同时在实现宽数据通路的流水线时,STFB电路需要与数据宽度一致的控制器个数,因此在STFB实现时,需要较大的功耗和面积代价。
异步电路因其具有低功耗、高性能和低电磁干扰的特性,正受到越来越多的关注。异步流水线是异步电路实现的主要形式,从而得到广泛研究,实用的异步流水线结构也被不断提出,例如在文中提出的超高速异步流水线控制单元GasP电路,在文中提出的准延时无关QDI异步流水线控制单元WCHB(weak condition half buffer)、PCHB(precharged fullbuffer),以及在文中提出的基于单通道通讯协议的QDI异步流水线控制单元STFB。
提出一种基于单通道通讯协议的高速异步流水线控制单元,与文中GasP电路的正向响应需要4次信号转换相比,该控制单元的正向响应只需要2次信号转换,从而大大减小了流水线的正向响应时间。同时,为了简化时序验证,另一种具有更强鲁棒性的QDI异步流水线控制单元被提出,该控制单元很好地解决了STFB控制单元高的功耗和面积消耗问题。
1 GasP电路与STFB电路
典型异步电路系统由一系列相互通讯的模块组成,在这些模块之间需要基于异步握手协议的通讯通道来完成数据交换,本文根据通讯通道的延时模型将其分为有限延时通讯通道和准延时无关通讯通道,图1给出了这两种类型的通讯通道。
其中图la中给出的有限延时的通讯通道,由于采用单轨制编码方式,可以有效的复用现有同步电路单元,并且在很大程度上节约了面积。但是有限延时模型决定了请求信号与数据有效之间存在复杂时序关系,在物理设计时,时序验证是一项复杂的工作。准延时无关通讯通道如图lb所示,该通道采用1-of-N的编码方式,此种编码使用冗余码,数据本身包含数据有效信息,不需要请求信号指示数据有效,这样也就有效避免了请求信号与数据有效信号之间复杂的时序关系。准延时无关通讯通道有效地简化了时序约束并易于实现异步电路的平均延时,但是,由于其需要检测数据有效,势必会引入额外的延时。
与同步电路相比,异步电路需要实现发送者和接收者之间的握手协议,因而会引入额外的延时、功耗以及面积的代价,如何设计有竞争力的控制器实现握手协议是异步电路设计的关键。
1.1 GasP电路
GasP电路作为高速异步流水线控制器被提出,图2给出了GasP电路的基本结构,通过逻辑努力电路优化之后,图中每一次信号翻转的延时相等。
初始化之后,节点L、 R和A均为高电平,当前一级电路准备好数据时,节点L将被设成低电平,此时自复位与非门的输出发生翻转,节点A被驱动到低电平,经过一级反相器,节点LE变为高电平,此时数据通过锁存器传输到下一流水级。当节点A电平为高后,节点L通过上拉的PMOS恢复到高电平,经过两级延时,节点R被驱动成低电平。在A为低电平后两个门延时,自复位与非门的两个输入为低电平,因此,自复位与非门的输出将自行恢复到高电平。在这一状态下,如果前一级电路再次将L驱动成低电平,自复位与非门的输出不会再次发生翻转,直到后一级电路完成对当前锁存数据的处理,将R重新设置成高电平。
正向响应时间定义为节点L变低到节点R变低过程中的信号转换次数。反向响应时间定义为节点R变高到节点L变高过程的信号转换次数。根据以上定义,GasP电路的正向响应时间为4次信号转换,而反向响应时间为2次信号转换。异步流水线的输入到输出的响应时间由流水级的正向响应时间决定,因此,Gasp电路获得高的吞吐率的同时,是以大的响应时间为代价的。当Gasp电路各级门的延时失配时,存在直流电流,从而引入了额外的功耗,并减慢了节点A由低向高的翻转速度。同时,GasP电路不利于实现准延时无关电路,在电路物理设计时,复杂的时序验证是不可避免的。
1.2 STFB电路
异步流水线控制器STFB电路由Ferretti M和Beerel P A提出,其电路结构如图3所示,其采用双轨制编码实现准延时无关异步通讯。
工作过程如下:初始化以后,节点L0、L1、R0、R1以及A均为低电平,节点B为高电平;一旦前一级电路准备好数据,L0和L1其中一个设置成高电平,这里假设L0被前一级电路设置成高电平,这时通过与非门S0节点设置成低电平。当S0为低时,节点A和节点R0被驱动成高。节点A变高以后,L0和L1被重新拉回到低电平,这标志着前一级电路可以发送新的数据。当R0变高以后,B节点由高电平变成低电平,防止S0、S1节点被再次拉高,直到后一级电路处理完Ro、R1上的数据,将R0设置成高电平之后,B节点重新回到高电平,新的数据才允许被再次传送到下一级。
从图3不难得出,STFB控制器的正向响应需要2次信号翻转,而反向响应需要4次信号翻转,一个周期的信号翻转次数与GasP电路一样,都是6次。当一个流水线的输出受限时,流水级的反向响应将影响其性能,同时在实现宽数据通路的流水线时,STFB电路需要与数据宽度一致的控制器个数,因此在STFB实现时,需要较大的功耗和面积代价。
- 一种新型防伪读码器的设计(01-01)
- 基于ARM与DSP的嵌入式运动控制器设计(04-25)
- 航天器DC/DC变换器的可靠性设计(02-12)
- 基于ARM核的AT75C220及其在指纹识别系统中的应用(05-24)
- 基于nRF2401智能小区无线抄表系统集中器设计(04-30)
- 卫星电源分系统可靠性设计与研究(02-12)