单通道通讯模式异步流水线控制器
时间:12-14
来源:互联网
点击:
2 低响应时间特性的异步流水线控制器
图4给出了基于单通道异步握手协议通讯通道结构,
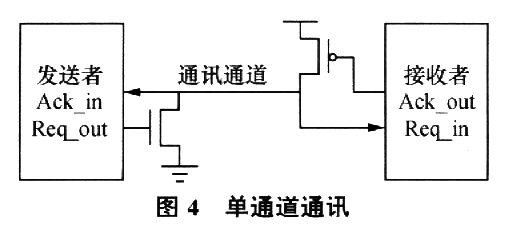
从图中可以看出,信号Ack_in和Ack_out总是反相的,因此在同一控制器中,从Ack_in到Ack_out需要奇数次反相,从Req_in到Req_out也需要奇数次反相。此外Req_out和Ack_out有效的条件是Req_in为低电平并且Ack_in为高电平,因此Req_in和Ack_in两个信号在进行与非操作或者或非操作前必须有一个信号需要先做一次反相。在设计控制器时,若由同一电路产生Req_out和Ack_out时,则从Req_in到Req_out或者从Ack_in到Ack_out路径中必有一条路径存在3级反相门,也就是说,正向响应或者反向响应需要4次信号转换(Req_out和Ack_0ut到通讯通道还有一次信号反相)。
为了减小正反向响应信号翻转的次数,将信号Req_out和Ack_out信号的产生电路分开,图5就是基于这一思想提出的一种新的具有低响应时间特性的异步流水线控制器。
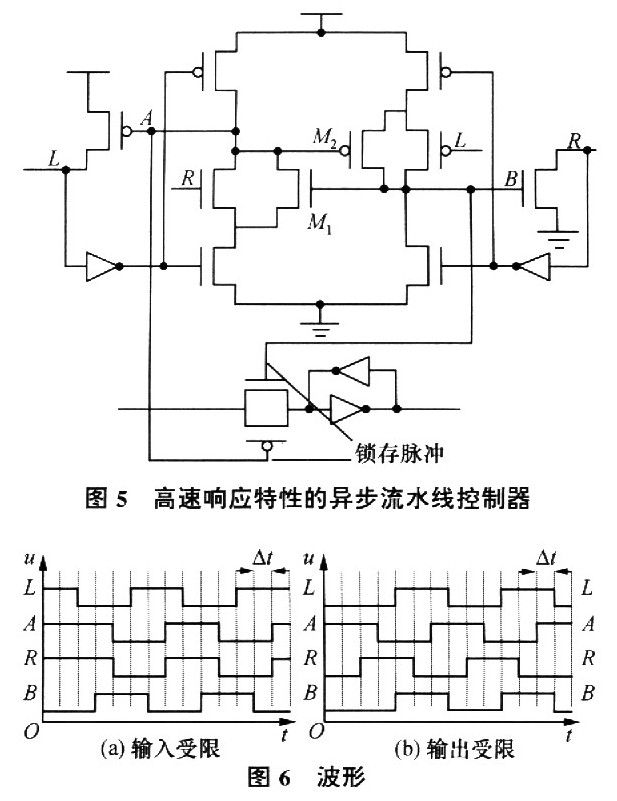
下面具体介绍该控制器的工作过程:在初始状态时,节点L、R和A均为高电平,节点B为低电平,此时晶体管M1、M2截止。当前一级电路将L节点驱动为低电平时,经过一级门延时,节点B被驱动成高电平,经过两级门延时节点A被驱动成低电平,节点R被驱动成低电平。在节点A为低以后,L节点通过PMOS管重新被拉成高电平,表示前一级电路可以发送新的数据。当R为低电平后两个门延时,B节点被重新驱动成低电平,同样在L为高电平后两个门延时,A节点重新回到高电平;当A是高电平,B是低电平时,L和R节点浮空,该流水级处于等待前一级的请求信号和后一级的应答信号状态。图6a给出了以上描
的输入受限(即请求信号晚于应答信号)的信号转换情况,而图6b是输出受限(即应答信号晚于请求信号)的信号转换情况。为了使在输入受限和输出受限两种不同情况下,节点A和节点B充放电时间都为3个门延时,如图5所示,加入了M1和M2管,以确保A、B信号在这两种情况下具有相同的脉宽。
上述异步流水线控制器的正反向响应都只需要2次信号翻转,与GasP电路相比,减小了50%的正向响应信号翻转次数。同时在设计GasP电路中,必须小心选择晶体管的尺寸,以保证每一级门的延时完全一致。如果各门延时出现失配,GasP将不能正常工作。而本文提出的控制器由于产生信号Req_out和Ack_out不再共享同一电路,使得在节点L被拉高之前节点A不会被拉高,同样,在节点R被拉低之前节点B不会被拉低,这样就消除了门延时失配导致电路失效的情况。
3 准延时无关异步电路控制
为了实现准延时无关异步流水线,提出第2种控制器。图7给出高鲁棒性的单通道异步控制器,该控制器使用Muller C单元代替第1种控制器中的与非门。对于一个基本的2输入Muller C单元,当其输入都为高时输出为高,其输入都为低时输出为低,其他情况,输出保持不变,图7中所示的MullerC单元是带有互补输出的。
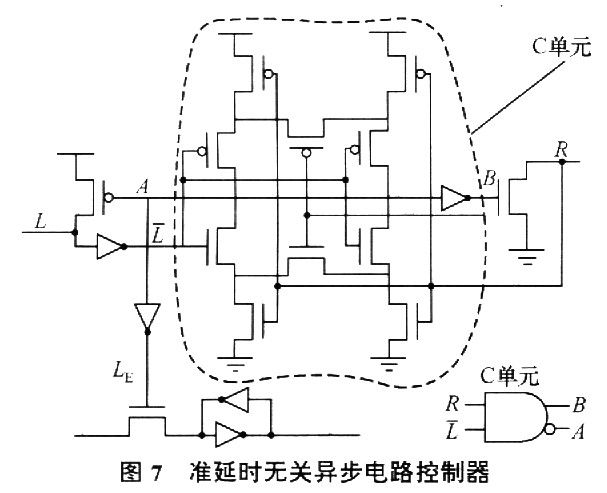
与第2节描述的第一个控制器类似,初始化以后,L、R和A为高电平,B为低电平,Muller C单元输出保持不变;一旦L节点被前一级电路设置成低电平,Muller C单元的输出将发生翻转,A节点变成低电平,B节点变成高电平;随后,L翻转成高电平,R变成低电平;当L为高,R为低以后,Muller C单元的两个输入都为低,Muller C单元将再次发生翻转,A节点为高,B节点为低,此时L和R节点浮空,该流水级处于等待前一级的请求信号和后一级的应答信号状态。
当L变低以后,该控制器需要经过3次信号转变才能将L恢复到高电平,同时,其前一级电路在检测到R为高后,同样需要3次信号转换才能将R节点变低。该控制器与GasP电路一样需要6次信号翻转来完成一个周期的操作,同样该控制器的正、反向响应时间也与GasP电路一致,分别为4次和2次信号转换。但是由于Muller C单元的逻辑努力要大于自复位与非门,因此该控制器在获得高鲁棒性的同时牺牲了一定的性能。
4 模拟结果
使用TSMC O.25 μm逻辑工艺库对文中的4个电路进行如下Hspice模拟:反相器的尺寸分别为Wp=1.4 μm,Wn=0.6μm,其他逻辑门的尺寸选择以与反相器具有相同驱动能力为原则,输出级MOS的尺寸为反相器管子尺寸的两倍。在GasP电路中,自复位与非门中PMOS管尺寸为Wp=2.8μm,STFB电路或非门中NMOS管的尺寸为Wn=0.9μm。表l给出了4个控制器的模拟结果,
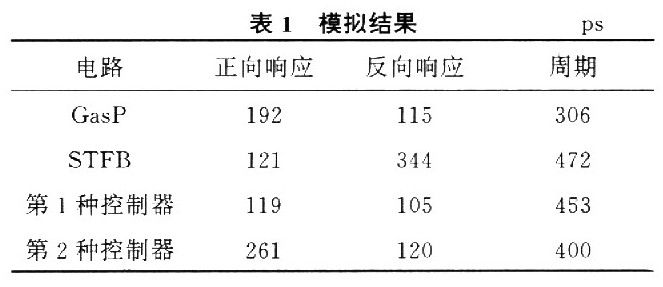
可以看出,与GasP电路相比,第1种控制器的正向响应时间减小了38.1%,而相对于STFB电路,第2种准延时无关控制器的吞吐率增加了15.3%。如果使用脉冲逻辑代替图5中的复杂逻辑门,第1种控制器将在具有和GasP电路几乎相同吞吐率的情况下,正向响应时间却仅为GasP电路的79.1%。
图4给出了基于单通道异步握手协议通讯通道结构,
从图中可以看出,信号Ack_in和Ack_out总是反相的,因此在同一控制器中,从Ack_in到Ack_out需要奇数次反相,从Req_in到Req_out也需要奇数次反相。此外Req_out和Ack_out有效的条件是Req_in为低电平并且Ack_in为高电平,因此Req_in和Ack_in两个信号在进行与非操作或者或非操作前必须有一个信号需要先做一次反相。在设计控制器时,若由同一电路产生Req_out和Ack_out时,则从Req_in到Req_out或者从Ack_in到Ack_out路径中必有一条路径存在3级反相门,也就是说,正向响应或者反向响应需要4次信号转换(Req_out和Ack_0ut到通讯通道还有一次信号反相)。
为了减小正反向响应信号翻转的次数,将信号Req_out和Ack_out信号的产生电路分开,图5就是基于这一思想提出的一种新的具有低响应时间特性的异步流水线控制器。
下面具体介绍该控制器的工作过程:在初始状态时,节点L、R和A均为高电平,节点B为低电平,此时晶体管M1、M2截止。当前一级电路将L节点驱动为低电平时,经过一级门延时,节点B被驱动成高电平,经过两级门延时节点A被驱动成低电平,节点R被驱动成低电平。在节点A为低以后,L节点通过PMOS管重新被拉成高电平,表示前一级电路可以发送新的数据。当R为低电平后两个门延时,B节点被重新驱动成低电平,同样在L为高电平后两个门延时,A节点重新回到高电平;当A是高电平,B是低电平时,L和R节点浮空,该流水级处于等待前一级的请求信号和后一级的应答信号状态。图6a给出了以上描
的输入受限(即请求信号晚于应答信号)的信号转换情况,而图6b是输出受限(即应答信号晚于请求信号)的信号转换情况。为了使在输入受限和输出受限两种不同情况下,节点A和节点B充放电时间都为3个门延时,如图5所示,加入了M1和M2管,以确保A、B信号在这两种情况下具有相同的脉宽。
上述异步流水线控制器的正反向响应都只需要2次信号翻转,与GasP电路相比,减小了50%的正向响应信号翻转次数。同时在设计GasP电路中,必须小心选择晶体管的尺寸,以保证每一级门的延时完全一致。如果各门延时出现失配,GasP将不能正常工作。而本文提出的控制器由于产生信号Req_out和Ack_out不再共享同一电路,使得在节点L被拉高之前节点A不会被拉高,同样,在节点R被拉低之前节点B不会被拉低,这样就消除了门延时失配导致电路失效的情况。
3 准延时无关异步电路控制
为了实现准延时无关异步流水线,提出第2种控制器。图7给出高鲁棒性的单通道异步控制器,该控制器使用Muller C单元代替第1种控制器中的与非门。对于一个基本的2输入Muller C单元,当其输入都为高时输出为高,其输入都为低时输出为低,其他情况,输出保持不变,图7中所示的MullerC单元是带有互补输出的。
与第2节描述的第一个控制器类似,初始化以后,L、R和A为高电平,B为低电平,Muller C单元输出保持不变;一旦L节点被前一级电路设置成低电平,Muller C单元的输出将发生翻转,A节点变成低电平,B节点变成高电平;随后,L翻转成高电平,R变成低电平;当L为高,R为低以后,Muller C单元的两个输入都为低,Muller C单元将再次发生翻转,A节点为高,B节点为低,此时L和R节点浮空,该流水级处于等待前一级的请求信号和后一级的应答信号状态。
当L变低以后,该控制器需要经过3次信号转变才能将L恢复到高电平,同时,其前一级电路在检测到R为高后,同样需要3次信号转换才能将R节点变低。该控制器与GasP电路一样需要6次信号翻转来完成一个周期的操作,同样该控制器的正、反向响应时间也与GasP电路一致,分别为4次和2次信号转换。但是由于Muller C单元的逻辑努力要大于自复位与非门,因此该控制器在获得高鲁棒性的同时牺牲了一定的性能。
4 模拟结果
使用TSMC O.25 μm逻辑工艺库对文中的4个电路进行如下Hspice模拟:反相器的尺寸分别为Wp=1.4 μm,Wn=0.6μm,其他逻辑门的尺寸选择以与反相器具有相同驱动能力为原则,输出级MOS的尺寸为反相器管子尺寸的两倍。在GasP电路中,自复位与非门中PMOS管尺寸为Wp=2.8μm,STFB电路或非门中NMOS管的尺寸为Wn=0.9μm。表l给出了4个控制器的模拟结果,
可以看出,与GasP电路相比,第1种控制器的正向响应时间减小了38.1%,而相对于STFB电路,第2种准延时无关控制器的吞吐率增加了15.3%。如果使用脉冲逻辑代替图5中的复杂逻辑门,第1种控制器将在具有和GasP电路几乎相同吞吐率的情况下,正向响应时间却仅为GasP电路的79.1%。
- 一种新型防伪读码器的设计(01-01)
- 基于ARM与DSP的嵌入式运动控制器设计(04-25)
- 航天器DC/DC变换器的可靠性设计(02-12)
- 基于ARM核的AT75C220及其在指纹识别系统中的应用(05-24)
- 基于nRF2401智能小区无线抄表系统集中器设计(04-30)
- 卫星电源分系统可靠性设计与研究(02-12)